


Nyt design til hoppende og vingeflapende mikrorobotter
Frugtfluebotens vinge. Kredit:Bhushan &Tomlin.
Forskere ved University of California (UC) Berkeley har for nylig designet to mikrobotter i insektskala, en der hopper og en anden der slår med sine kunstige vinger. Disse robotdesigner, præsenteret i to artikler, der er forududgivet på arXiv, efterligne ægte biologisk adfærd observeret hos insekter. De to mikrobots, omtalt som frugtfluebot og hoppende µbot, blev udviklet af ph.d. studerende Palak Bhushan som en del af sit speciale under vejledning af sin professor, Claire Tomlin.
I fremtiden, små robotter kan have adskillige vigtige applikationer, hjælpe mennesker med opgaver som fjernmåling, leder efter overlevende efter naturkatastrofer, og udforskning af rummet. Faktisk, mikrobots har flere gunstige egenskaber, inklusive deres lille størrelse, insektlignende manøvredygtighed og lettere navigation i udfordrende terræn.
"Robustheden til barske terræner øges generelt, jo mindre en bot interagerer med miljøet, " fortalte Bhushan og Tomlin TechXplore . "Flere og jumpere (f.eks. fluer, græshopper, osv.) minimere denne interaktion ved at flyve/springe over forhindringerne og til deres næste destination, i modsætning til myrer, der skal gå over hver lille bump. Flyers er mere relevante for Jorden og andre planeter med tæt atmosfære, hvorimod jumpere er mere relevante for steder med ubetydelig eller ingen atmosfære og lavere tyngdekraft."
Den første robot udviklet af forskerne, som de omtaler som frugtflueboten, er det første sub-milligram vinge køretøj nogensinde udviklet, der effektivt efterligner insekt vinge kinematik. De fleste små flagrende vingemikrobots til dato er på 100 mg masseskalaen. I naturen, imidlertid, små flyvende insekter (fx frugtfluer) er i en 1 mg masseskala, og nogle kan være endnu mindre.

'frugtfluebot'-vingehøjden, ovenfra. Kredit:Bhushan &Tomlin.
"Motivationen bag udviklingen af denne særlige mikrobot var at bygge bro over størrelsesforskellen mellem det, der er blevet lavet, og hvad der er muligt, " forklarede forskerne. "Vores hovedformål var at demonstrere flagrende vingebevægelser i denne størrelsesskala ved hjælp af indbyggede motorer og mekanismer, men med ekstern elektrisk strøm."
Små flyvende insekter genererer typisk løft ved at udføre store vingeslag. En af de vigtigste udfordringer for Bhushan og Tomlin under udviklingen af denne robot var at skabe små aktuatorer, der er i stand til at generere store nok rotationer til at drive de kunstige vinger.
"Tidligere arbejder bruger små rotationsmotorer og forstærker derefter denne bevægelse til store rotationer ved hjælp af en forstærkermekanisme, Bhushan og Tomlin forklarer. "Funktionsstørrelserne i disse forstærkningsmekanismer går ned til 70um, selv for 100 mg-skala bots. Blot at nedskalere designet med 100x ville føre til en endnu mindre motorbevægelse, som igen ville kræve endnu lavere funktionsstørrelser i forstærkermekanismen, hvilket ikke er muligt."
For at tackle problemer forbundet med at nedskalere designet af mikrobotten, forskerne skabte en motor med stor rotation, der ikke kræver nogen forstærkningsmekanismer for at fungere. De opnåede dette ved at udvikle en torsionsfjeder, hvor små rotationer af individuelle udkragere lægges sammen for at producere en stor rotation, når de drives ved resonans.

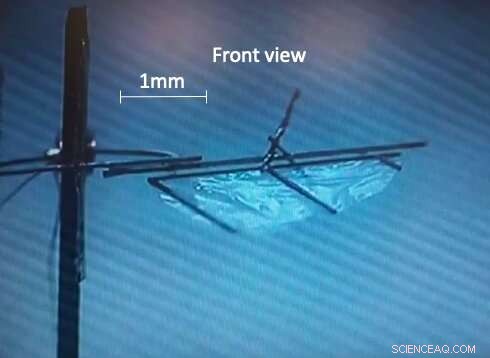
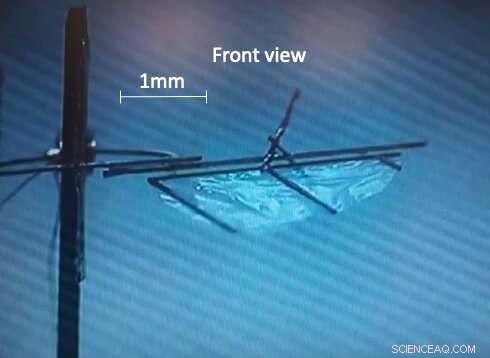
'frugtfluebot'-vingehøjden, forfra. Kredit:Bhushan &Tomlin.
Med forskernes design, den flyvende robots funktionsstørrelser kan kun gå ned til 100um, selv på 1 mg-skalaen. Bemærkelsesværdigt, deres frugtfluebot kan fremstilles inden for relativt kort tid. Ud over, dens lave driftsspændinger (dvs. 70mV) skulle gøre det nemt at teste og implementere i fremtiden.
Den anden mikrobot udviklet af forskerne er en hoppebot, der måler 17 mm x 6 mm x 14 mm i størrelse og vejer 75 milligram. Den forbundne version af denne robot kan hoppe 6 gange i minuttet, lander perfekt på fødderne. For at hoppe op med 8 mm i højden, botten bruger cirka 6,4 mW strøm.
Ligesom frugtflueboten, denne lille robot er den mindste af sin slags med sine muligheder, i hvert fald hvad forskerne angår. Faktisk, den mindste hopperobot, der er rapporteret i tidligere undersøgelser, har en indbygget strømkilde, der vejer cirka 300 mg og kun kan hoppe én gang, før dens kemiske strømkilde er opbrugt.
"Vi havde til formål at udvikle noget i masseskalaen under 100 mg, der kunne udføre gentagelige hop, " sagde forskerne. "Bemærk at her, da vi er i meget større skala sammenlignet med frugtflueboten, vi kan være mere ambitiøse og dermed have en indbygget strømkilde, såvel."
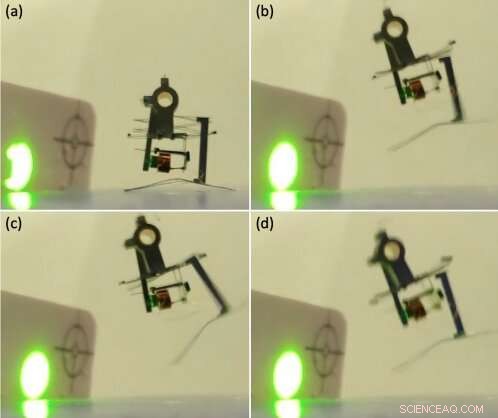
Den hoppende µbot udfører et hop ved hjælp af laserkraft. Kredit:Bhushan &Tomlin.
Små springende insekter skubber generelt jorden hurtigt med deres ben, mens de udfører et hop. Dette øjeblikkelige effektbehov er alt for højt til at kunne gengives med en indbygget motor. For at overkomme denne udfordring, tidligere undersøgelser har brugt motorer til at lagre energi i en indbygget mekanisme og derefter hurtigt frigive denne energi, som giver robotten mulighed for at udføre hop. I deres undersøgelse, forskerne besluttede også at bruge denne tilgang.
"Motorer er tunge, svær at fremstille i små skalaer, og kræver specielle styresignaler for at betjene dem, Bhushan og Tomlin sagde. "For at forenkle fremstilling og kontrol, vi sikrede, at vores design er i stand til at fungere med en enkelt motor ved at få de andre nødvendige funktioner til at foregå passivt, Plus, vi designer vores motor til at fungere med enkle ON/OFF styresignaler for at fungere."
I hoppeboten udviklet af Bhushan og Tomlin, en enkelt motor genererer en kontinuerlig rotationsbevægelse ved at akkumulere små rotationer. Denne bevægelse bruges derefter til at vikle en snor, der er designet til at trække en fjeder i en energilagringsmekanisme. Når energien når en bestemt tærskel, mekanismen frigiver hurtigt robottens lagrede energi, som i sidste ende tillader den at hoppe.
"Det enkle kontrolkrav til vores motor giver os mulighed for at drive den ved hjælp af 1 mg fotovoltaiske celler, der producerer strøm, når en infrarød laser skinner på dem - men denne strømkilde er blot en pladsholder for fremtidige mikrobatterier, når de bliver tilgængelige, " tilføjede forskerne.

Den hoppende µbot. Kredit:Bhushan &Tomlin.
De fleste eksisterende 100 mg-skala bots bruger piezoelektriske og elektrostatiske aktuatorer, der kræver høje spændinger på 200-5000V for at fungere. Det betyder, at de ofte kæmper med de tunge og ineffektive spændingsforstærkende kredsløb, der bruges til at drive dem. Ifølge forskerne, dette er hovedårsagen til, at meget få helt tøjleløse mikrobots blev oprettet indtil videre.
"Vi har med succes designet nye elektromagnetiske aktuatorer, som er et magnet plus spolesystem, ligesom i dine hovedtelefoner, der har brug for lav spænding for at fungere - kun 0,07V for frugtfluebot, og 0,8V til hoppebot, Bhushan og Tomlin sagde. når vi vil have gode mikrobatterier i fremtiden (det har vi ikke lige nu), vores bots vil være meget lettere og bruge meget lavere strøm for at fungere."
For at kunne fungere effektivt, alle 1 mg-skala bots, samt flere 100 mg-skala bots, kræver et særligt 'kontrolleret' miljø, for eksempel karakteriseret ved et skiftende eksternt magnetfelt, en varmeplade eller en vibrerende plade. Aktuatorerne, der bruges af denne frugtfluebot og hoppebot, på den anden side, er ombord, derfor klarer disse små robotter sig også godt i almindelige miljøer.
Imponerende nok, forskerne var i stand til at skabe den mindste vingespændende enhed, der er rapporteret endnu, som har samme masse som en frugtflue. De har også med succes designet den letteste ubundne hoppebot med en indbygget strømkilde, der nogensinde er udviklet hidtil.
Vinge blafrende robots vinge. Kredit:Bhushan &Tomlin.
I øjeblikket, batterier er stadig ikke i stand til at understøtte 100 mg-skala flyvende robotter, Det kan derfor tage lidt tid for forskerne at få succes med deres 1 mg-skala flyvende bot. I øvrigt, botens motor har en effekteffektivitet på 0,7 procent, mens en frugtflues muskler har en effektivitet på 17 pct.
I deres fremtidige arbejde, forskerne planlægger at fokusere på udviklingen af mere effektive motorer, for at perfektionere deres design yderligere og forberede sig på, hvornår batterier, der er små nok til at understøtte deres bot, endelig frigives. De vil også gerne skabe laveffekt sub-0,1 mg sensorer og controllere, da dette ville give dem mulighed for at gøre deres frugtfluebot autonom.
"Med hensyn til den hoppende bot, vi planlægger at tilføje en vandret komponent til lanceringshastigheden, som så kan hjælpe botten med at navigere rundt, " Bhushan og Tomlin forklarede. "I betragtning af de lave strømkrav til denne bot og en større størrelse sammenlignet med frugtflueboten, vi burde også være i stand til at tilføje eksisterende batterier til den for at få den til at udføre fuldstændigt selvforsynende hop."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Mod netto energispildevandsrensning ved hjælp af nuværende teknologiKredit:Kompetenzzentrum Wasser Berlin gGmbH Kommunal spildevandsrensning i Europa bruger energi, der svarer til omkring to kraftværker om året – men kunne faktisk generere energien til 12. Det EU-
Mod netto energispildevandsrensning ved hjælp af nuværende teknologiKredit:Kompetenzzentrum Wasser Berlin gGmbH Kommunal spildevandsrensning i Europa bruger energi, der svarer til omkring to kraftværker om året – men kunne faktisk generere energien til 12. Det EU- -
 Robotter kommer til skaldyrsindustrien. Her er hvorforNordøstlige professor Taskin Padir, yderst til venstre, fandt ud af, at forarbejdningsvirksomheder i skaldyr i New Bedford var begejstrede for at bringe robotter ind. Kredit:Matthew Modoono/Northeaste
Robotter kommer til skaldyrsindustrien. Her er hvorforNordøstlige professor Taskin Padir, yderst til venstre, fandt ud af, at forarbejdningsvirksomheder i skaldyr i New Bedford var begejstrede for at bringe robotter ind. Kredit:Matthew Modoono/Northeaste -
 Harley-Davidson:ingen amerikansk salg ramt af offshoring dustupHarley-Davidson befandt sig under angreb fra den amerikanske præsident Donald Trump, efter at virksomheden besluttede at flytte noget produktion til udlandet. men ledere siger, at de snart ikke har no
Harley-Davidson:ingen amerikansk salg ramt af offshoring dustupHarley-Davidson befandt sig under angreb fra den amerikanske præsident Donald Trump, efter at virksomheden besluttede at flytte noget produktion til udlandet. men ledere siger, at de snart ikke har no -
 Italien overtager Alitalia som reaktion på virusItaliens Alitalia flyver igen Italiens regering lovede tirsdag at re-nationalisere det konkursramte tidligere flagskib Alitalia for at sikre, at kriser som coronavirus-pandemien aldrig strander si
Italien overtager Alitalia som reaktion på virusItaliens Alitalia flyver igen Italiens regering lovede tirsdag at re-nationalisere det konkursramte tidligere flagskib Alitalia for at sikre, at kriser som coronavirus-pandemien aldrig strander si
- Forskere opdager rester, der har hindret effektiviteten af lovende type solceller
- Kunne koldt sted på himlen være et blåt mærke fra en kollision med et parallelt univers?
- Ny tilgang til forbedring af perovskitfilmers stabilitet og optiske egenskaber
- Kvinder i videnskaben stiller færre spørgsmål end mænd, ifølge ny forskning
- Lakseundersøgelse kan forhindre Trumps plan om at øge vandleverancerne til Central Valley-farme
- Ansigtsgenkendelse bliver tilvalgsfunktion på Facebook