


Parasitic Body:Et virtual reality-system til at studere indsamlingen af visuel feedback fra robotarme
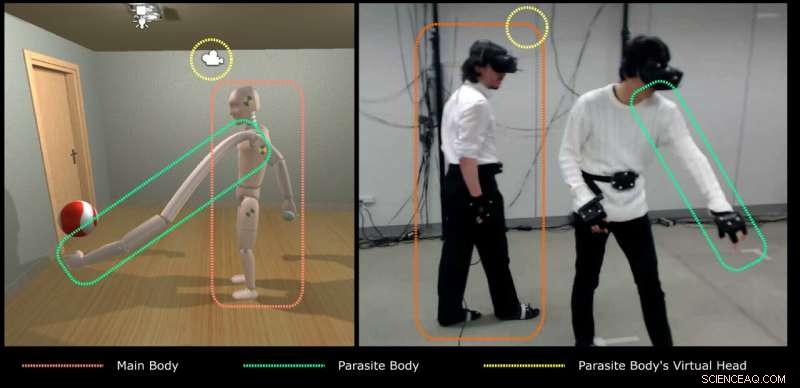
Den parasitære krop i to sammenhænge. Til venstre, VR-perspektivet. Til højre, det rigtige rum med begge deltagere. Deltageren til venstre (angivet med rødt) styrer hoveddelen. Deltageren til højre (angivet med grønt) styrer det parasitære lem. Den gule cirkel angiver kamerapositionen i begge sammenhænge. Kredit:Takizawa et al.
Nylige fremskridt inden for robotteknologi har gjort det muligt at udvikle systemer til at hjælpe mennesker med en række forskellige opgaver. En type robotsystem, der har vundet betydelig popularitet i løbet af de sidste par år, er bærbare robotarme, der fjernbetjentes af en tredjepart.
Mens du hjælper brugere, disse arme skal indsamle visuel feedback og dele den med tredjepartsoperatøren. Denne feedback kan indsamles på flere måder, den mest almindelige er ved at placere et kamera på brugeren, der 'værter' robotarmen, også omtalt som hovedorganoperatør (MBO). Denne særlige tilgang til indsamling af visuelle data, imidlertid, kan være noget begrænsende, da det er meget afhængigt af bevægelserne hos den bruger, der bærer systemet.
Med denne begrænsning i tankerne, forskere ved Keio University, RIKEN AIP og University of Tokyo har for nylig udviklet et virtual reality-system (VR) til at undersøge konceptet "kropsredigering, " som indebærer brugen af bærbare robotlemmer til at hjælpe mennesker med daglige opgaver. Deres forskning blev finansieret af Japan Science and Technology Agency (JST)'s Exploratory Research for Advanced Technology (ERATO) program.
"Det overordnede mål med vores seneste arbejde var at studere kropsredigering som en del af vores forskningsgruppe, ERATO JIZAI, "Adrien Verhulst, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Kropsredigering, såsom at udvide kroppen med bærbar assisterende robotteknologi, er et koncept, der er let at finde i nogle kulturelle områder, som i manga-serien Parasyt , af Hitoshi Iwaaki. Vi tænkte ved os selv, 'At have et kunstigt væsen knyttet til dig og hjælpe dig er præcis, hvad vi leder efter, Så vi prøvede at kopiere ideen løst i VR."
Verhulst og hans kolleger ønskede at udføre, hvad der kunne betegnes som et 'shared body'-eksperiment. I stedet for at foreslå en løsning til at overvinde de nuværende systemers begrænsninger for at indsamle visuel feedback, de sætter sig for at sammenligne og evaluere eksisterende tilgange.
At gøre dette, de udviklede et VR-system, der bruger optitrack-teknologi til at spore en brugers krop og et hovedmonteret display (HMD) for at se retningen af både MBO'ens og robotarmens kroppe. I deres papir, forskerne omtaler robotarmens bruger som "hovedlegemet" og til tredjeparts teleoperatør som "snyltlegemet".
"Det er logisk at tro, at hvis 'parasitlegemet' er knyttet til hovedlegemet, så når hovedkroppen bevæger sig, parasitten ender med at blive syg, ikke sandt?" sagde Verhulst. "Følgelig, spørgsmålene vi stillede os selv er:Hvordan skal vi tilpasse den visuelle feedback, som kroppen indsamler? Skulle det være et tredje synspunkt, som i videospil? Hvor skal det så placeres:over hovedkroppen, på siden, eller rettere tæt på handlingen? Måske kunne vi dele den samme opfattelse? Eller et syn afhængigt af begge menneskers bevægelse?"
Teams på forskellige virksomheder og institutioner har præsenteret flere tilgange til at indsamle visuel feedback fra robotarme. De mest fremtrædende blandt disse er "delt syn"-konceptet, visningen af tredje person og visningen tæt på handlingen.
Som antydet af deres navne, tilgangen med delt visning indsamler visuel feedback, der matcher, hvad brugeren, der bærer robotarmen, ser; tredjeperson se, hvad en tredje person ville se, hvis de stod ved siden af eller bagved brugeren, og visningen tæt på handlingen viser et nærbillede af den opgave, der er ved at blive udført. Forskerne ønskede at undersøge, om disse forskellige synsmåder skulle være afhængige af hovedkroppens bevægelse, parasitlegemet, eller begge.
For at undersøge dette spørgsmål, de udførte et eksperiment på 16 menneskelige brugere ved hjælp af det VR-system, de udviklede. Dette gav dem mulighed for at indsamle interessant indsigt om forskellige tilgange til indsamling af visuel feedback. Ikke desto mindre, deres resultater er stadig foreløbige, da antallet af personer, der deltog i deres undersøgelse, er begrænset.
"Folk skal føle sig orienteret i retning af deres lem for at kunne bruge det. Prøv dette:Hvis du sætter et kamera foran dig i en mærkelig vinkel, og kan kun se dig selv fra det kamera, du vil have sværere ved at bevæge din arm i en given retning, " forklarede Verhulst. "Det betyder, at hver gang hovedkroppen bevæger sig, parasittens krop omorienterer sig selv. Interessant nok, vi bemærkede ikke en skarp forskel i kropsejerskabsscore, hvilket betyder, at uanset synspunkt, deltagerne følte, at de 'ejede' deres krop, og at de havde styr på det."
Observationerne indsamlet af Verhulst og hans kolleger tyder på, at synspunktsafhængighed ikke er så vigtig. Med andre ord, om man indsamler visuel feedback ved at placere et kamera på robotarmen, på den menneskelige brugers skulder, eller midt imellem de to, han/hun kan stadig opnå det korrekte "kropsejerskab", når han ser gennem kameraet.
"De resultater, vi indsamlede, var meget overraskende, " tilføjede Verhulst. "Vi har heller ikke observeret nogen væsentlige vanskeligheder med hensyn til arbejdsbelastning (dvs. fysisk belastning, mental belastning, indsats, tid), hvilken, igen, antyder, at kameraafhængigheden ikke betyder noget i denne henseende. Imidlertid, deltagernes præstation var en smule bedre i situationer, hvor udsigten afhænger af både hovedkroppen og parasitten, antyder, at for maksimal effektivitet, det kan være bedre at have kameraet placeret på hovedhuset, men være motoriseret til at følge bevægelsen af den person, der styrer robotarmen."
Undersøgelsen udført af dette team af forskere fokuserede specifikt på perspektivafhængigheden af robotarms tredjepartsoperatører i opgave, der involverede at finde og nå objekter. I fremtiden, VR-systemet, de udviklede, kunne også bruges til at studere tilgange til at indsamle visuel feedback på mere omfattende og realistiske opgaver.
"Det næste skridt er at skabe et eksperimentelt miljø med mere realistiske situationer og konfigurationer, "Ryo Takizawa, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "At udforske samarbejdsmetoder i samarbejde, vi tænker på at begrænse kommunikationsmetoder og forbedre VR-modeller, og så videre."
Forskerne besluttede at bruge VR og udføre et virtuelt eksperiment, fordi det var en nem og billig løsning, der ikke krævede vedligeholdelse af avancerede robotsystemer. For at fastslå gyldigheden af deres resultater, imidlertid, de bliver i sidste ende nødt til at sammenligne deres resultater med dem, der opnås med en ægte robotarm.
I deres fremtidige arbejde, Verhulst og hans kolleger planlægger også at udføre et lignende eksperiment, hvor deltagerne på forhånd trænes i den opgave, de skal løse, da de mener, at dette ville føre til forskellige resultater. I dette studie, faktisk, brugerne modtog ingen forudgående træning, før de brugte deres VR-platform.
"Vi er nødt til at overveje, hvordan man designer en træningsopgave eller et program i en kropsredigeret og delt kropskontekst, især med hensyn til, hvordan man glatter over, hvis ikke forbedre, samarbejdsopgaver, "Katie Seaborn, en anden forsker, der var involveret i undersøgelsen, fortalte TechXplore. "Jeg har udforsket ideen om samtidig, samme bevægelsessynkronisering, som har været forbundet med boosts i samarbejdspræstationer i andre sammenhænge. Vi spekulerer på, om en sådan 'delt handling'-strategi ville fungere i dette tilfælde, med to personer, der deler en meget usædvanlig krop i VR."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 UAE's tekniske ambitioner plettet af internetrestriktionerDe Forenede Arabiske Emirater har investeret milliarder i nye teknologier og kunstig intelligens som en del af sin Vision 2021 udviklingsplan Med sin ultramoderne infrastruktur og hyperforbundne t
UAE's tekniske ambitioner plettet af internetrestriktionerDe Forenede Arabiske Emirater har investeret milliarder i nye teknologier og kunstig intelligens som en del af sin Vision 2021 udviklingsplan Med sin ultramoderne infrastruktur og hyperforbundne t -
 Twitter angriber automatiserede botkontiTwitter sagde, at det slår ned på bots eller automatiserede konti som dem, der forsøgte at manipulere følelser under valgkampen i 2016 i USA Twitter meddelte onsdag et nedslag i konti drevet af so
Twitter angriber automatiserede botkontiTwitter sagde, at det slår ned på bots eller automatiserede konti som dem, der forsøgte at manipulere følelser under valgkampen i 2016 i USA Twitter meddelte onsdag et nedslag i konti drevet af so -
 Elektriske scootere lanceres i Paris, at sprede sig i EuropaLime og andre private operatører af nye transportdelingsløsninger søger at udnytte problemerne med Velib og Autolib i Paris Boulevarderne i Paris, allerede travlt med et svimlende udvalg af transp
Elektriske scootere lanceres i Paris, at sprede sig i EuropaLime og andre private operatører af nye transportdelingsløsninger søger at udnytte problemerne med Velib og Autolib i Paris Boulevarderne i Paris, allerede travlt med et svimlende udvalg af transp -
 At vende blikket mod terroristerneKredit:CC0 Public Domain Det er kendt, at meget terroraktivitet udnytter kraften og umiddelbarheden af online sociale medier og sociale netværksværktøjer til at koordinere dets angreb, samle stø
At vende blikket mod terroristerneKredit:CC0 Public Domain Det er kendt, at meget terroraktivitet udnytter kraften og umiddelbarheden af online sociale medier og sociale netværksværktøjer til at koordinere dets angreb, samle stø
- Forskere udvikler et 3D-billede af en interstellar sky, hvor stjerner fødes
- Sommerfugleeffekt kan fordoble vandring af virusfyldte dråber
- Hvad er der i vejen med universet? Forskere har svaret
- Fremskridt inden for nano-landbrug:Små ting har enorm effekt på plantevækst
- En selvslettende chip til sikkerhed og anti-forfalskningsteknologi
- Fortryk:Hvordan udkast til akademiske papirer er blevet afgørende i kampen mod COVID