


Multifunktionelle metalliske rygrader til origami-robotik
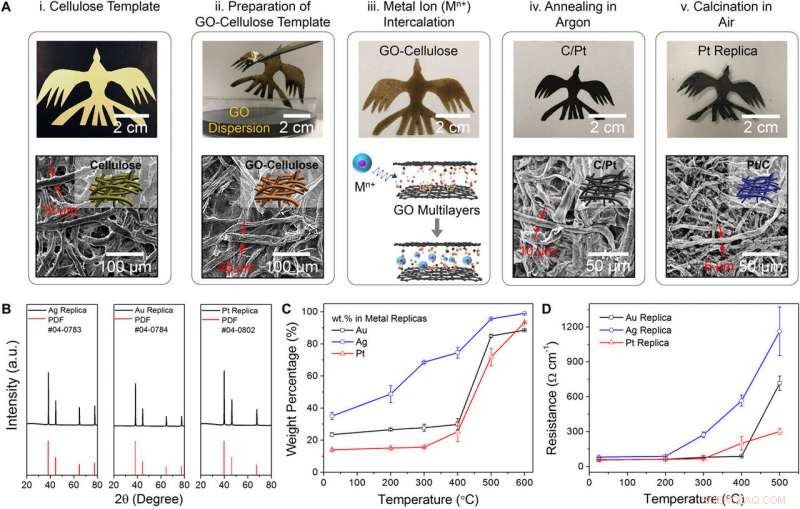
GO-aktiveret skabelonsyntese af ædelmetalreplikater. (A) Den GO-aktiverede skabelonsyntese til at omdanne cellulosepapir til ædelmetalreplikater. Syntesen af en phoenix-formet Pt-replika er demonstreret. SEM-billederne viste, at netværksmorfologierne af cellulosepapir og GO-celluloseskabelon var meget ens. Mikrofibrenes diameter faldt fra ~20 til ~6 μm efter to-trins annealing/calcinering. (B) XRD (røntgendiffraktion) spektre af as-syntetiserede metal replikaer efter to-trins annealing/calcinering. Spektraerne var i overensstemmelse med deres tilsvarende "pulverdiffraktionsfiler (PDF)" fra "den fælles komité for pulverdiffraktionsstandarder." (C) Vægtprocenter af metallisk indhold i skabelonkopierne efter kalcinering i luft ved forskellige temperaturer. Vægtprocenterne bestemmes ved EDS (energidispersiv røntgenspektroskopi) analyse. (D) Modstand af skabelonformede metalreplikaer (på tværs af 1 cm) efter kalcinering i luft ved forskellige temperaturer. Fejlbjælkerne angiver forskellene i målinger fra fire prøver. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Origami-robotter kan dannes ved tæt at integrere flere aktiveringsfunktioner, sansning og kommunikation. Men opgaven er udfordrende, da konventionelle materialer, herunder plast og papir, der bruges til sådanne robotdesigns, pålægger begrænsninger for at begrænse tilføjelsesfunktioner. For at installere multifunktionaliteter til systemet skal forskerne typisk inkludere ekstern elektronik, der øger robottens vægt. I en nylig undersøgelse offentliggjort på Videnskab robotik , Haitao Yang og kolleger ved de tværfaglige afdelinger for Chemical and Biomolecular Engineering, Biomedicinsk teknik og elektro- og computerteknik i USA og Singapore udviklede en grafenoxid (GO)-aktiveret skabelonsynteseproces for at producere rekonfigurerbare, kompatibel og multifunktionel metallisk rygrad. Rygraden dannede grundlaget for origami-robotter kombineret med indbygget belastningsføling og trådløs kommunikation. Ved at bruge GO-metoden, forskerne dannede komplekse ædelmetalorigamier som strukturelle replikationer af papirskabeloner.
Forskerholdet kunne reproducere platin-origami-strukturer gjort stabile med tynde elastomerer for at danne multifunktionelle rygrader for at skabe de nye origami-robotter. De nye robotter var mere deformerbare, brandhæmmende og strømbesparende end dem, der er bygget af andre materialer. Yang et al. observerede tilføjede muligheder for de nye platinrobotter (Pt-robotter), inklusive on-demand resistiv opvarmning, strain sensing og indbyggede antenner uden ekstern elektronik. For yderligere funktioner, de inkluderede overvågning eller registrering af robotbevægelser i realtid, trådløs kommunikation mellem robotter, varmeregulering og magnetisk styring. Det nye arbejde berigede robotmaterialebiblioteket til at konstruere alsidige bløde robotter.
Forskere inden for robotteknologi havde tidligere udforsket den gamle japanske origami -kunst til at konstruere kunstige muskler, selvfoldende maskiner, spring origami-systemer og robotmetamorfose. Konventionelt, de brugte cellulosepapir, polyester, polyetheretherketon og polytetrafluorethylen til fremstilling af rygraden til sådanne opfindelser. På trods af den mekaniske støtte, der tilbydes, papir eller plastskelettet manglede funktionaliteter af stimuli -lydhørhed, sansning og trådløs kommunikation. I stedet for at installere eksternt udstyr til at levere sådanne funktioner, forskerhold sigter nu mod at udvikle multifunktionelle bløde robotter til tæt integration. Forskningsindsatsen har endnu ikke vist sådanne prototypiske bløde robotter med ledende origami-rygrad med sanse- og kommunikationspotentiale. Som resultat, forskere er ivrige efter at udvikle en ny fabrikationsordning for at producere mekanisk stabile, blød og ledende robotrygrad.
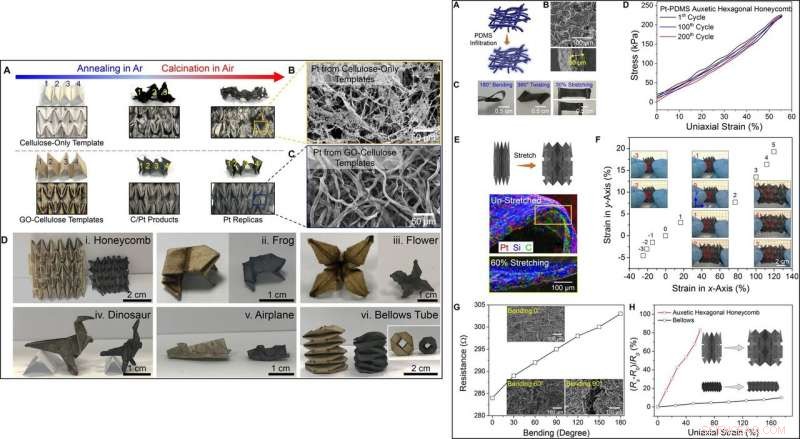
TIL VENSTRE:Fremstilling af metalorigamistrukturer. (A) Billeder af de firfoldige og auxetiske sekskantede metalorigamiprodukter syntetiseret fra kun cellulose (øverste række) og GO-celluloseskabeloner (nederste række). Pt-baserede produkter på forskellige annealing/calcineringsstadier er vist. SEM-billeder af Pt-produkter syntetiseret fra (B) cellulose-only og (C) GO-cellulose skabeloner. (D) Fotos af GO-cellulose-origami og nedskalerede Pt-origami-kopier efter skabeloner, herunder (i) honeycomb, (ii) frø, (iii) blomst, (iv) dinosaur, (v) flyvemaskine, og (vi) bælgerør. TIL HØJRE:Forvandler Pt-origami-replikaer til deformerbare Pt-elastomer-metamaterialer. (A) Infiltration af fortyndet elastomervæske i skabelonformede Pt-replikaer muliggør fremstilling af Pt-elastomer-metamaterialer. (B) Top-down og tværsnit SEM billeder af Pt-elastomer komposit. Tykkelsen af Pt-elastomer komposit er omkring 90 μm. (C) Stor deformerbarhed af en plan Pt-elastomer tynd film (180° bøjning, 360° vridning, og 30 % udstrækning). (D) Spænding-belastningskurver af en Pt-elastomer auxetisk sekskantet origami under stabilitetstesten i 200 cykler. (E) In situ SEM-billeder med EDS-kortlægning af en Pt-elastomerfold under 90 % enakset strækning. (F) Mønstrene for Pt-elastomer auxetic hexagonal origami er belastningsafhængige under den enaksede komprimering (markeret med -1 til -3) og strækningsprocesser (markeret med 1 til 5). Figuren markeret med 0 repræsenterede starttilstanden. (G) Modstandsændringer af en flad Pt-elastomer film under bøjning fra 0° til 180°. (H) Relative modstandsændringer af auxetic hexagonal og bælg Pt-elastomer origamis under forskellige enaksede stammer. Rs er modstanden af Pt-elastomer origami under enaksede stammer; R0 er modstanden for ubelastet Pt-elastomer origami. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Under fremstillingsprocessen, Yang et al. brugte grafenoxid (GO) flerlag til at interkalere en række metalion-prækursorer, efterfulgt af højtemperaturudglødning og kalcinering for at producere de højdimensionelle GO-strukturer. Metaloxid-replikaerne inkluderede mikroteksturer, Fritstående tråde og komplekse origamistrukturer med fremragende kemisk kontrol og strukturel replikation. Den foreslåede GO-afledte metode vil give en ny platform til at producere komplekse metalliske arkitekturer som multifunktionelle rygrader til bløde robotter.
Yang et al. konverterede cellulosepapirfilmene eller origamiformerne til en række metalreplikaer ved hjælp af den GO-aktiverede skabelonproces. De fulgte fire hovedtrin under fremstillingsprocessen begyndende med en phoenix-formet skabelon for at danne ædelmetalsalt (Mn) + ) -interkalerede GO-cellulosekomplekser (M-GO-cellulose). De resulterende metalreplikaer gennemgik yderligere udglødnings- og kalcineringsprocesser under fremstillingen, og forskerholdet kontrollerede dem ved at justere deres kalcineringstemperatur. Forskerne skabte komplekse metalliske origami-strukturer såsom sekskantede honningkager, frøer, blomster, dinosaurer, flyvemaskiner og bælge ved at konvertere forskellige 3D-origami-strukturer fra cellulosepapirform til platinmetal.
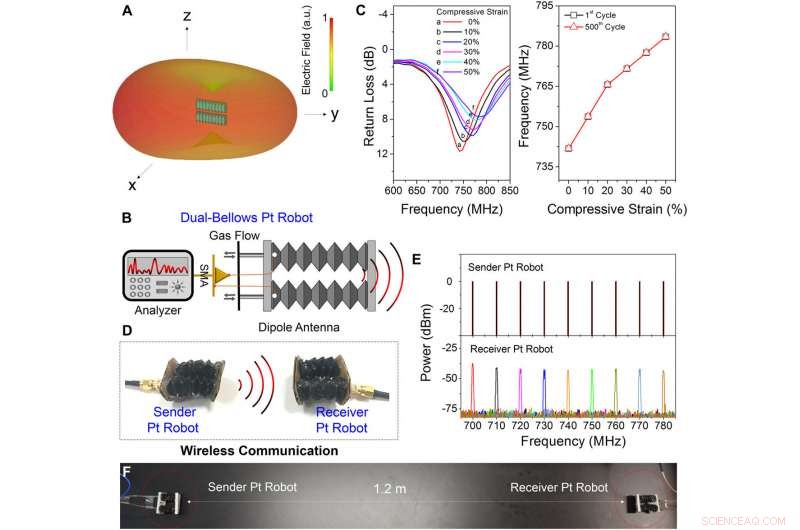
Origami Pt robot med indbyggede trådløse kommunikationsmuligheder. (A) Simulerede 3D-strålingsmønstre for to Pt-elastomer bælgrør ved 741,8 MHz under 0 % belastning. (B) Skematisk demonstration af en dobbeltbælg Pt-robot, som også fungerede som en rekonfigurerbar dipolantenne. (C) Venstre:Returtab af den rekonfigurerbare dipolantenne under forskellige kompressionsbelastninger fra 0 til 50 %. Til højre:Resonansfrekvenserne er en funktion af kompressionsspændinger før og efter 500-cyklus robotaktivering. (D) Fotografi af en afsender Pt robot (sender signaler) (venstre) og en modtager Pt robot (modtager signaler) (højre). (E) Pulssignalerne (afsenderen Pt -robot sendt) blev godt modtaget af modtagerens Pt -robot. Frekvensen af sendte signaler var identisk med de modtagne signaler. (F) To Pt-robotter var i stand til at kommunikere eksternt over 1,2 m afstand. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
For at forbedre den mekaniske stabilitet, de inkluderede tynde elastomerer til metalorigamistrukturerne for stor deformerbarhed og reversibel rekonfiguration. Yang et al. valgte platinmetal på grund af dets effektive strukturelle bevarelse, høj mekanisk fleksibilitet og høj elektrisk ledningsevne sammenlignet med guld (Au) eller sølv (Ag). Holdet optimerede Pt-elastomer-rygraden til høj elektrisk ledningsevne og mekanisk fleksibilitet, for at den resulterende plane Pt-elastomer-komposit kan opretholde store og gentagne deformationer - ideel til bløde robotrygrade. De rekonfigurerbare metalliske rygrader introducerede flere og forskellige funktionaliteter for at danne metamateriale origami-robotter, herunder iboende potentiale for brandmodstand. Forskerholdet testede denne funktion ved at tillade Pt-robotter at opretholde direkte kontakt med en flamme ved længere tids eksponering (800 0 C i 30 sekunder), til sammenligning antændtes en papirrobot på sekunder (mindre end 5 sekunder).
Pt-elastomer-rygraden var tyndere og lettere end cellulosepapirrobotterne, men forblev mekanisk stabil under reversibel robotaktivering. Den papirbaserede robot krævede store trykændringer for at forlænge eller trække sig sammen; hvorimod Pt-robotten kun krævede lavere trykændringer. Yang et al. udviklede derefter den ledende Pt origami -robot til at sende og modtage elektromagnetiske (EM) bølger og tjene som en rekonfigurerbar antenne til trådløs kommunikation. Før fremstilling, forskerholdet simulerede 3D-strålingsmønstre for at udforske brugen af Pt-robotter som strålingsantenner og fremstillede dem derefter. Forskerne viste også trådløs kommunikation mellem to Pt-robotter, der fungerede som afsender og modtager. Når en afsenderrobot sendte pulssignaler ved forskellige frekvenser, modtagerrobotten stationeret 1,2 m væk modtog dem uden frekvensafvigelse mellem de sendte og modtagne signaler.
Sammenligning af gastrykket mellem papir- og Pt-robotter. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
Holdet sammenlignede fem kategorier af robotegenskaber i arbejdet for at demonstrere tekniske fordele ved at bruge de GO-aktiverede Pt metalliske rygrader i forhold til (1) rygradsdensitet, (2) mekanisk stivhed, (3) energieffektivitet, (4) belastningssensorfunktioner og (5) trådløse kommunikationsmuligheder. Forskerholdet har yderligere optimeret de to Pt-robotter til trådløs kommunikation, hvor en afsenderrobot trådløst leverede navigationsinstruktioner til en modtagerrobot for med succes at omgå en konstrueret forhindring ved at følge en guidet vej.
Holdet udvidede derefter applikationer af systemet ved hjælp af additiv 3-D fremstilling, hvor de kombinerede Pt-Go-celluloseblæk med fused deposition modeling (FDM) til 3-D-print af metalliske, robotiske rygradstøbte former. Efterfølgende de konstruerede Pt-robotter til fjernstyring med magnetfelter. For det, Yang et al. syntetiserede en Pt-replika med Pt-Go-celluloseblæk og infiltrerede polymeropløsningen med magnetiske partikler for at skabe en magnetisk Pt-rygrad. De nye strukturer indeholdt de sædvanlige indbyggede belastningssensorer og trådløse kommunikationsmuligheder, med tilføjet magnetisk bevægelse. De magnetiske Pt-robotter kunne gennemgå reversibel form- og kropstransformation under magnetisk aktivering for at bevæge sig fremad i overensstemmelse med roterende magnetfelter.
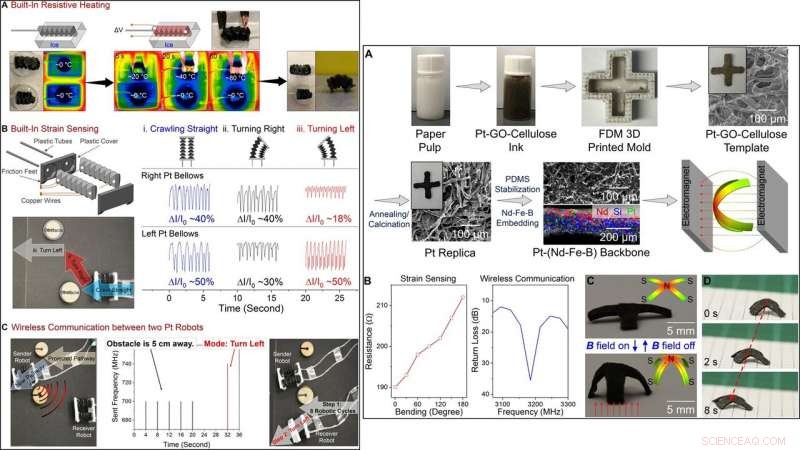
TIL VENSTRE:Demonstrationer af multifunktionelle Pt-robotter. (A) Enkeltbælge Pt-robot med indbygget resistiv varmekapacitet. To Pt-robotter blev frosset i isterninger. Under en påført spænding på 20 V, den øverste Pt-robot blev hurtigt opvarmet til ca. 80°C på 60 sek. flygtede fra isen, og fortsatte med at kravle frem. (B) Dobbeltbælge Pt-robot med indbygget belastningsfølende funktion. Pt -robotstammen var forbundet med kobbertråde, og forbindelsen blev rettet ved hjælp af sølvpasta. Den foreslåede vej for dobbeltbælg Pt-robotten involverede (i) at kravle ligeud, (ii) dreje til højre, og (iii) drej til venstre. Robotaktueringerne langs hele vejen blev overvåget ved at læse de aktuelle profiler af venstre og højre Pt-bælgrør. (C) Trådløs kommunikation mellem to dobbeltbælge Pt-robotter. Afsenderrobotten blev blokeret af en forhindring på den projicerede vej og drejet til venstre for at omgå forhindringen. Afsenderrobotten sendte en række signaler til modtagerrobotten. Signalerne blev derefter fortolket til den bevægelige guideline for modtagerrobotten, gør det muligt for robotten at tage den foreslåede vej uden at støde på forhindringen. TIL HØJRE:Fremstilling af magnetisk aktiveret Pt-robot via Pt-GO-celluloseblæk. (A) Alternativ fremstilling af Pt-robotter blev demonstreret ved at udvikle Pt-GO-celluloseblæk og inkorporere med FDM 3D-print. Efter to-trins udglødning/kalcinering, PDMS -stabilisering, og indlejring med Nd-Fe-B-partikler, en magnetisk aktiveret Pt-(Nd-Fe-B) tetrapod-robot blev fremstillet. (B) Indbygget belastningsregistrering og trådløs kommunikationskapacitet i Pt-(Nd-Fe-B) tetrapod-robot. (C) Pt-(Nd-Fe-B) tetrapod-robot buet op og ned under magnetiske aktiveringer. (D) Pt-(Nd-Fe-B) tetrapod-robot bevægede sig fremad ved at følge banerne for roterende magnetfelter. Kredit:Science Advances, doi:10.1126/scirobotics.aax7020.
På denne måde Haitao Yang og kolleger udviklede en Go-enabled templating synteseprotokol til at producere rekonfigurerbare, kompatibel og multifunktionel metallisk rygrad til at bygge metalliske origami-robotter. Robotterne indeholdt indbygget strain sensing og trådløs kommunikationsfunktioner. De syntetiske metalliske rygrader lavet med komplekse ædelmetaller inklusive sølv, guld og platin var høje strukturelle gentagelser af deres papirmodstykker. Sammenlignet med traditionelt papir og plast, de rekonfigurerbare Pt-elastomer-rygrad tilbød let vægt, deformerbarhed og energieffektivitet. Yang et al. forestille sig praktiske applikationer til metalliske origami-robotter lige fra aktiviteter i højrisikomiljøer, til brug i kunstige muskler og robotarme, og som fjernstyrede ubundne robotter. De sigter mod at optimere metalliske rygrad med elektrokemisk aktive materialer for derefter at danne energilagringsenheder. Sådanne udviklinger vil berige robotmaterialebiblioteket til at fremstille forskellige bløde robotter med højfunktionel integration.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Undersøgelse giver rammer for vurdering af historiske smedejernsstrukturerInstitution of Civil Engineers vil hædre Debra Laefers forskning, en professor i civil- og byteknik ved NYU Tandon, der brugte jordbaseret laserscanning (TLS) til at undersøge Irlands historiske Guinn
Undersøgelse giver rammer for vurdering af historiske smedejernsstrukturerInstitution of Civil Engineers vil hædre Debra Laefers forskning, en professor i civil- og byteknik ved NYU Tandon, der brugte jordbaseret laserscanning (TLS) til at undersøge Irlands historiske Guinn -
 Kraft til folket:elektricitet når endelig indiske vartegnEt par ser fjernsyn på Elephanta-øen nær Mumbai, hvor hundredvis af landsbyboere for første gang har fået installeret netstrøm i deres huse Deepa Bhoir plejede at sidde i mørke uden for sit hjem p
Kraft til folket:elektricitet når endelig indiske vartegnEt par ser fjernsyn på Elephanta-øen nær Mumbai, hvor hundredvis af landsbyboere for første gang har fået installeret netstrøm i deres huse Deepa Bhoir plejede at sidde i mørke uden for sit hjem p -
 Ny hydraulisk aktuator vil gøre robotter hårdereDenne figur viser en syvakset hydraulisk robotarm, der brækker betonplader, hver 30 mm tyk. Dette er en prototype til sammenligning med en firbenet robot, der også udvikles i dette projekt af Waseda U
Ny hydraulisk aktuator vil gøre robotter hårdereDenne figur viser en syvakset hydraulisk robotarm, der brækker betonplader, hver 30 mm tyk. Dette er en prototype til sammenligning med en firbenet robot, der også udvikles i dette projekt af Waseda U -
 Internettilsynsmænd søger undertrykkelse af svindel med coronavirus-webstederInternettets online adresse manager ICANN opfordrer til en stærkere indsats for at stoppe spredningen af falske websteder, der bruger coronavirus-pandemien til at snyde forbrugere Agenturet, der
Internettilsynsmænd søger undertrykkelse af svindel med coronavirus-webstederInternettets online adresse manager ICANN opfordrer til en stærkere indsats for at stoppe spredningen af falske websteder, der bruger coronavirus-pandemien til at snyde forbrugere Agenturet, der
- Nye teknologier i havenergisektoren
- Jo langsommere de drejer, jo lysere lyser de
- Supercomputing efterligner berkelium-eksperimenter for at validere nyt fund
- Kaster livliner til jobsøgende efter fængsling
- Skab forandring gennem forskning
- University of Californias regenter godkender sjælden undervisningsvandring