


Styring af slangelignende robotter for høj mobilitet og fingerfærdighed
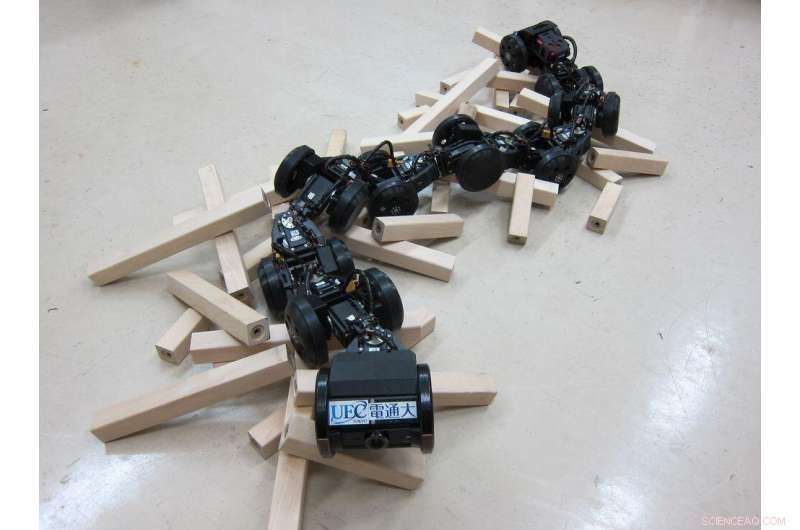
Den slangelignende robot T 2 Slange-3. Kredit:University of Electro Communications
Slangelignende artikulerede mobile robotter kan trænge ind i snævre rum og forcere forhindringer ved hjælp af deres lange og tynde kroppe, og er effektive til inspektion af snævre rum og eftersøgnings- og redningsoperationer på katastrofesteder. Imidlertid, det er svært at kontrollere deres præcise bevægelser, fordi de har så mange aktuatorer.
Nu, Motoyasu Tanaka og kolleger ved University of Electrocommunications Tokyo, foreslå metoder til at styre slangelignende robotter til tredimensionel styring, trappegang og manipulering af genstande, og har udviklet den slangelignende robot T 2 Slange-3. Ved tredimensional styring, robotten følger det omgivende terræn ved at slappe af i leddene, og genoptager derefter at bevæge sig fra robottens stilling. Operatøren kan nemt styre og flytte robotten på ujævnt terræn ved denne metode. Til at gå på trapper, robotten skifter autonomt sin bevægelse på trapper fra hoved til hale på passende tidspunkt, fordi data fra sensorer, der er fastgjort til bunden af robotten, bruges til at udløse bevægelsen. For at manipulere et objekt, positionen og orienteringen af griberen, der er fastgjort til robottens hoved, styres ved at holde den passende stilling ved autonomt at vælge tildelingen af de løftede/jordede hjul. Selvom robotten T 2 Snake-3 har cirka tredive aktuatorer, operatøren kan nemt betjene robotten ved at bruge disse metoder og en gamepad.
Robotten T 2 Snake-3 kom ind i snævre rum, klatring af et en meter højt trin, at gå på trapper, og roterende ventiler ved at bruge de foreslåede metoder. Den slangelignende robot blev styret effektivt til inspektionsudstyr og katastrofeberedskab.
 Varme artikler
Varme artikler
-
 Ultralyd-firewall til mobiltelefonerUltralyd-firewall til mobiltelefoner. Kredit:St. Poelten UAS / Matthias Zeppelzauer Det permanente netværk af mobile enheder kan bringe brugernes privatliv i fare og føre til nye former for overvå
Ultralyd-firewall til mobiltelefonerUltralyd-firewall til mobiltelefoner. Kredit:St. Poelten UAS / Matthias Zeppelzauer Det permanente netværk af mobile enheder kan bringe brugernes privatliv i fare og føre til nye former for overvå -
 FNs luftfartsagentur skjulte alvorlige hack:medierDen Montreal-baserede internationale civile luftfartsorganisation blev i november 2016 offer for det mest alvorlige cyberangreb i sin historie, Sagde Radio-Canada Det Montreal-baserede FN-luftfart
FNs luftfartsagentur skjulte alvorlige hack:medierDen Montreal-baserede internationale civile luftfartsorganisation blev i november 2016 offer for det mest alvorlige cyberangreb i sin historie, Sagde Radio-Canada Det Montreal-baserede FN-luftfart -
 Bezos forsvarer Amazons indsats for Pentagon -skyprojektAmazons Jeff Bezos siger, at teknologigiganten fastholder sit bud på en større Pentagon cloud computing -kontrakt Amazon -chef Jeff Bezos forsvarede mandag selskabets bud på en større Pentagon clo
Bezos forsvarer Amazons indsats for Pentagon -skyprojektAmazons Jeff Bezos siger, at teknologigiganten fastholder sit bud på en større Pentagon cloud computing -kontrakt Amazon -chef Jeff Bezos forsvarede mandag selskabets bud på en større Pentagon clo -
 Marriotts sikkerhedsbrud afslørede data på op til 500 millioner gæster (Opdatering)Denne 1. feb. 2010, fil foto, viser Westin Philadelphia-hotellet i Philadelphia. Oplysningerne om så mange som 500 millioner gæster på Starwood-hoteller er blevet kompromitteret, og Marriott sagde, at
Marriotts sikkerhedsbrud afslørede data på op til 500 millioner gæster (Opdatering)Denne 1. feb. 2010, fil foto, viser Westin Philadelphia-hotellet i Philadelphia. Oplysningerne om så mange som 500 millioner gæster på Starwood-hoteller er blevet kompromitteret, og Marriott sagde, at
- Hvad var George Washington Carvers opfindelser?
- Ny nanoteknologi opdager biomarkører for kræft
- Venus:Kunne den virkelig rumme liv? Ny undersøgelse udspringer af en overraskelse
- Fisk udgjorde en overraskende stor del af stenalderkosten
- EPA vagthund undersøger luftkvalitetsresultater udstedt efter Harvey
- Styring af krystalstørrelsen af organiske halvledere