


Formskiftende robot bygget af smarticles viser ny bevægelsesstrategi
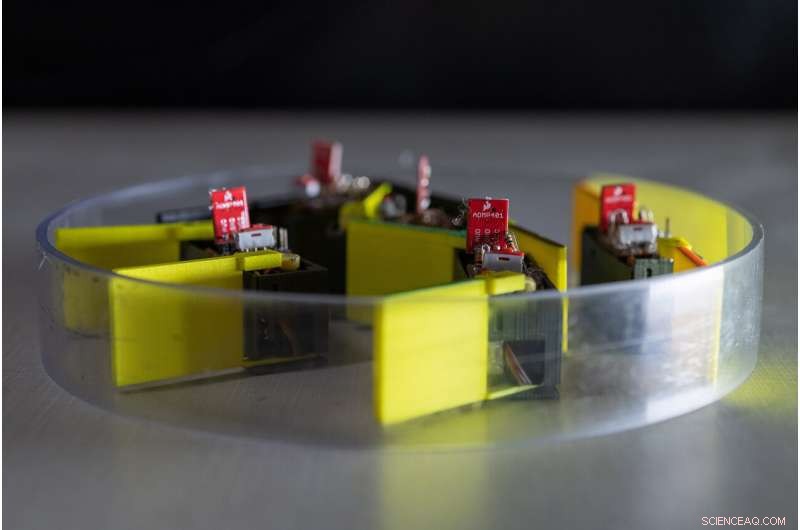
Fem identiske "smarticles" - smarte aktive partikler - interagerer med hinanden i et indelukke. Ved at nusse hinanden, gruppen - kaldet en "supermarticle" - kan bevæge sig på tilfældige måder. Kredit:Georgia Tech, Rob Felt
At bygge konventionelle robotter kræver typisk en omhyggelig kombination af komponenter som motorer, batterier, aktuatorer, kropsdele, ben og hjul. Nu, forskere har taget en ny tilgang, bygge en robot udelukkende fra mindre robotter kendt som "smarticles" for at låse op for principperne for en potentielt ny bevægelsesteknik.
De 3-D-printede smarticles - en forkortelse for smarte aktive partikler - kan kun én ting:klappe med deres to arme. Men når fem af disse smarticles er begrænset i en cirkel, de begynder at nusse hinanden, danner et robofysisk system kendt som en "supermarticle", der kan bevæge sig af sig selv. Tilføjelse af en lys- eller lydsensor gør det muligt for supersmartikken at bevæge sig som reaktion på stimulus - og endda blive kontrolleret godt nok til at navigere i en labyrint.
Selvom det er rudimentært nu, forestillingen om at lave robotter af mindre robotter – og udnytte de gruppeevner, der opstår ved at kombinere individer – kunne give mekanisk baseret kontrol over meget små robotter. Ultimativt, gruppens nye adfærd kunne give en ny bevægelses- og kontroltilgang til små robotter, der potentielt kunne ændre form.
"Dette er meget rudimentære robotter, hvis adfærd er domineret af mekanik og fysikkens love, " sagde Dan Goldman, en Dunn Family Professor ved School of Physics ved Georgia Institute of Technology. "Vi søger ikke at sætte sofistikeret kontrol, sansning og beregning på dem alle. Efterhånden som robotter bliver mindre og mindre, vi bliver nødt til at bruge mekanik og fysik principper til at kontrollere dem, fordi de ikke vil have det niveau af beregning og sansning, vi ville have brug for til konventionel kontrol."
Forskningen, som blev støttet af Army Research Office og National Science Foundation, er planlagt til udgivelse 18. september i tidsskriftet Videnskab robotik . Forskere fra Northwestern University bidrog også til projektet.
Grundlaget for forskningen kom fra en usandsynlig kilde:en undersøgelse af byggematerialer. Ved at hælde disse kraftige hæfteklammer i en beholder med aftagelige sider, tidligere ph.d. studerende Nick Gravish – nu fakultetsmedlem ved University of California San Diego – skabte strukturer, der ville stå af sig selv, efter at containerens vægge var blevet fjernet.
At ryste hæftetårnene fik dem til at kollapse, men observationerne førte til en erkendelse af, at simpel sammenfiltring af mekaniske objekter kunne skabe strukturer med kapaciteter langt ud over de enkelte komponenters.
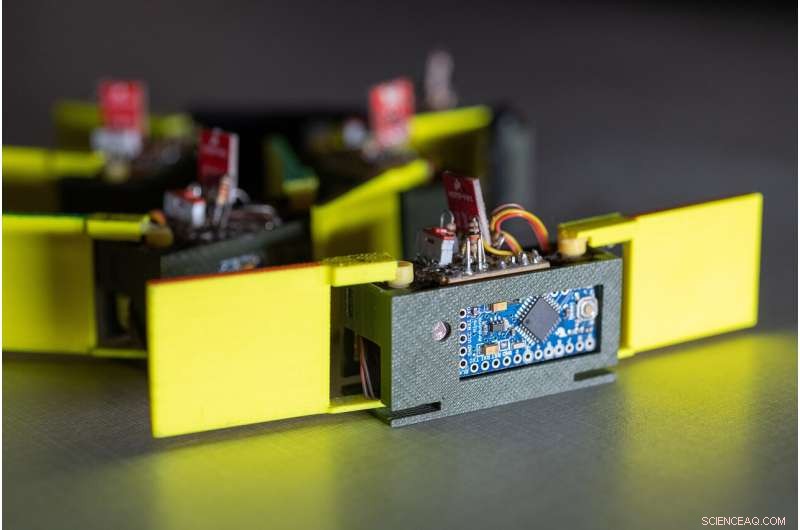
Nærbillede af en "smarticle" - smart aktiv partikel - der viser de to 3D-printede arme, lyssensor og motor. Kredit:Georgia Tech, Rob Felt
"En robot lavet af andre rudimentære robotter blev visionen, " sagde Goldman. "Du kunne forestille dig at lave en robot, hvor du ville justere dens geometriske parametre lidt, og det, der dukker op, er kvalitativt ny adfærd."
For at udforske konceptet, kandidatforsker Will Savoie brugte en 3-D printer til at skabe batteridrevne smarticles, som har motorer, simple sensorer og begrænset computerkraft. Enhederne kan kun ændre deres placering, når de interagerer med hinanden enheder, mens de er omsluttet af en ring.
"Selvom ingen individuel robot kunne bevæge sig af sig selv, skyen bestående af flere robotter kunne bevæge sig, mens den skubbede sig selv fra hinanden og krympe, mens den trak sig sammen, Goldman forklarede. "Hvis du sætter en ring rundt om skyen af små robotter, de begynder at sparke rundt på hinanden, og den større ring – det vi kalder en supersmarticle – bevæger sig tilfældigt rundt."
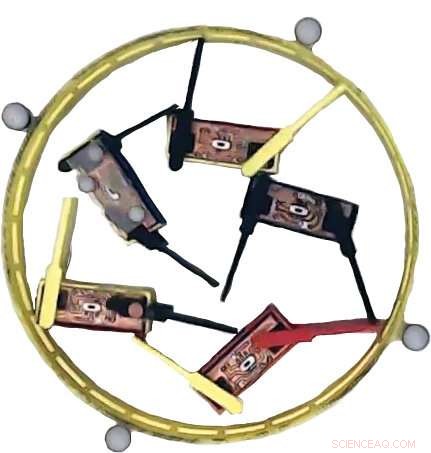
En supersmart. Kredit:Savoie et al., Sci. Robot. 4, eaax4316 (2019)
Forskerne bemærkede, at hvis en lille robot holdt op med at bevæge sig, måske fordi dens batteri døde, gruppen af smarticles ville begynde at bevæge sig i retning af den stoppede robot. Graduate-studerende Ross Warkentin lærte at kunne styre bevægelsen ved at tilføje fotosensorer til robotterne, der stopper armen med at blafre, når en stærk lysstråle rammer en af dem.
"Hvis du vinkler lommelygten rigtigt, du kan fremhæve den robot, du vil være inaktiv, og det får ringen til at slynge hen imod eller væk fra den, selvom ingen robotter er programmeret til at bevæge sig mod lyset, " sagde Goldman. "Det gjorde det muligt at styre ensemblet på en meget rudimentær måde, stokastisk måde."
School of Physics Professor Kurt Wiesenfeld og kandidatstuderende Zack Jackson modellerede bevægelsen af disse smarticles og supersmarticles for at forstå, hvordan skub og masse af ringen påvirkede den samlede bevægelse. Forskere fra Northwestern University undersøgte, hvordan interaktionerne mellem smarticles gav retningsbestemt kontrol.
"For many robots, we have electrical current move motors that generate forces on parts that collectively move a robot reliably, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
I det fremtidige arbejde, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. For eksempel, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."
 Varme artikler
Varme artikler
-
 Siliciumgennembrud kan føre til ny højtydende bøjelig elektronikKredit:CC0 Public Domain En ny metode til at skabe bøjelige siliciumchips kan hjælpe med at bane vejen for en ny generation af fleksible elektroniske enheder med høj ydeevne. I to nye papirer, In
Siliciumgennembrud kan føre til ny højtydende bøjelig elektronikKredit:CC0 Public Domain En ny metode til at skabe bøjelige siliciumchips kan hjælpe med at bane vejen for en ny generation af fleksible elektroniske enheder med høj ydeevne. I to nye papirer, In -
 Forebyggelse bedre end helbredelse for at forhindre unge brugere i at blive involveret i cyberkrimin…Kredit:CC0 Public Domain Meget målrettede beskedkampagner fra lovhåndhævelse kan være overraskende effektive til at afholde unge spillere fra at blive involveret i cyberkriminalitet, en ny undersø
Forebyggelse bedre end helbredelse for at forhindre unge brugere i at blive involveret i cyberkrimin…Kredit:CC0 Public Domain Meget målrettede beskedkampagner fra lovhåndhævelse kan være overraskende effektive til at afholde unge spillere fra at blive involveret i cyberkriminalitet, en ny undersø -
 Flyselskaber tager ingen chancer med vores sikkerhed – det skal kunstig intelligens heller ikkeKredit:Shutterstock Man skulle tro, at det ville være farligere at flyve i et fly end at køre bil. I virkeligheden er det meget mere sikkert, dels fordi luftfartsindustrien er stærkt reguleret. F
Flyselskaber tager ingen chancer med vores sikkerhed – det skal kunstig intelligens heller ikkeKredit:Shutterstock Man skulle tro, at det ville være farligere at flyve i et fly end at køre bil. I virkeligheden er det meget mere sikkert, dels fordi luftfartsindustrien er stærkt reguleret. F -
 Mens Facebook står over for ild, varmen dukker op på nr. 2 SandbergI denne 5. sept. 2018, fil foto Facebook COO Sheryl Sandberg vidner før høringen i Senatets efterretningskomité om Udenlandsk indflydelsesoperationer og deres brug af sociale medieplatforme på Capitol
Mens Facebook står over for ild, varmen dukker op på nr. 2 SandbergI denne 5. sept. 2018, fil foto Facebook COO Sheryl Sandberg vidner før høringen i Senatets efterretningskomité om Udenlandsk indflydelsesoperationer og deres brug af sociale medieplatforme på Capitol
- Kvindelige kandidater, der bærer sexet tøj, ses som mindre dygtige end kolleger
- Dybt under havet, mikrober er aktive og klar til at spise, hvad der end kommer deres vej
- Generelle egenskaber ved Savanna Biome
- Farvede mænd undgår offentlige steder af frygt for involvering med kriminalretlige agenter
- Robotter er optimeret til kedelige, gentagne opgaver. Kan de automatiseres til mere komplekse arbejd…
- Nyt RNA-modificerende værktøj korrigerer genetiske sygdomme, herunder driver af triple-negativ bry…