


Forskerhold afslører Tunabot, første robotfisk til at holde trit med en tun
Udvikling af en højfrekvent eksperimentel platform, der udforsker svømmefiskenes præstationsrum. Kredit:Haibo Dong
Mekaniske ingeniører ved University of Virginia School of Engineering, leder et samarbejde med biologer fra Harvard University, har skabt den første robotfisk, der har vist sig at efterligne hastigheden og bevægelserne af levende gulfinnet tun.
Deres fagfællebedømte papir, "Tunrobotik:en højfrekvent eksperimentel platform, der udforsker svømningsfiskes ydeevne, " blev offentliggjort 18. september, 2019, i Videnskab robotik .
Anført af Hilary Bart-Smith, professor i UVA Engineerings Institut for Mekanisk og Rumfartsteknik, robottunprojektet blev født ud af et femårigt, 7,2 millioner dollars Multi-disciplinært universitetsforskningsinitiativ, US Office of Naval Research, tildelte Bart-Smith til at studere hurtigt, effektiv svømning af forskellige fisk. Målet med Bart-Smiths projekt er at bedre forstå fiskens fremdrifts fysik, forskning, der i sidste ende kunne informere udviklingen af den næste generation af undersøiske køretøjer, drevet af fiskelignende systemer bedre end propeller.
Undervandsrobotter er også nyttige i en række applikationer, såsom forsvar, efterforskning af marine ressourcer, infrastrukturinspektion og rekreation.
Længe før bio-inspirerede fremdrivningssystemer kan blive levedygtige til offentlig og kommerciel brug i bemandede og ubemandede køretøjer, imidlertid, forskere skal være i stand til pålideligt at forstå, hvordan fisk og andre væsner bevæger sig gennem vandet.
"Vores mål var ikke kun at bygge en robot. Vi ønskede virkelig at forstå videnskaben om biologisk svømning, " sagde Bart-Smith. "Vores mål var at bygge noget, som vi kunne teste hypoteser på i forhold til, hvad der gør biologiske svømmere så hurtige og effektive."
Holdet skulle først studere den biologiske mekanik af højtydende svømmere. Harvard-biologiprofessor George V. Lauder og hans team af forskere målte præcist svømmedynamikken for gulfinnet tun og makrel. Ved at bruge disse data, Bart-Smith og hendes team, forsker Jianzhong "Joe" Zhu og Ph.D. studerende Carl White, konstruerede en robot, der ikke kun bevægede sig som en fisk under vandet, men slog halen hurtigt nok til at nå næsten tilsvarende hastigheder.
De sammenlignede derefter den robot, de kaldte "Tunabot" med levende eksemplarer.
"Der er mange papirer om fiskerobotter, men de fleste af dem har ikke mange biologiske data i sig. Så jeg tror, at dette papir er unikt med hensyn til kvaliteten af både robotarbejdet og de biologiske data, der er gift sammen til et papir, " sagde Lauder.
"Det, der er så fantastisk med de resultater, vi præsenterer i papiret, er lighederne mellem biologi og robotplatformen, ikke kun med hensyn til svømmekinematik, men også med hensyn til forholdet mellem hastighed og haleslagsfrekvens og energiydelse, " sagde Bart-Smith. "Disse sammenligninger giver os tillid til vores platform og dens evne til at hjælpe os med at forstå mere om fysikken i biologisk svømning."
Teamets arbejde bygger på UVA Engineerings styrker inden for autonome systemer. Institut for Mekanisk og Rumfartsteknik er deltager i UVA Engineering's Link Lab for cyberfysiske systemer, der fokuserer på smarte byer, intelligent sundhed og autonome systemer, herunder selvkørende køretøjer.
Tunabot-projektet er en udløber af Bart-Smiths anden, stærkt konkurrencedygtigt multidisciplinært universitetsforskningsinitiativ fra Office of Naval Research; i 2008, Bart-Smith modtog en pris på 6,5 millioner dollars for at udvikle en undervandsrobot modelleret efter en manta ray.
Testene af Tunabot finder sted i et stort laboratorium i Mechanical and Aerospace Engineering Building ved UVA Engineering, i en flowtank, der fylder omkring en fjerdedel af rummet, og på Harvard University i en lignende facilitet. De øjenløse, finneløs replika fisk er omkring 10 inches lang; den biologiske ækvivalent kan blive op til syv fod lang. En fiskeline tøjring holder robotten stabil, mens et grønt laserlys skærer hen over plastfiskens midtlinje. Laseren måler den flydende bevægelse, som robotten afgiver med hvert sweep af dens fremstillede hale. Når strømmen af vand i flowtanken øges, Tunabotens hale og hele krop bevæger sig i et hurtigt bøjningsmønster, ligner den måde en levende gulfinnet tun svømmer på.
"Vi ser i fiskerobotiklitteraturen indtil videre, at der er virkelig fantastiske systemer, andre har lavet, men dataene er ofte inkonsekvente med hensyn til måling og præsentation. Det er bare den aktuelle tilstand på robotområdet i øjeblikket. Vores papir om Tunabot er vigtig, fordi vores omfattende ydeevnedata sætter barren meget højt, " sagde White.
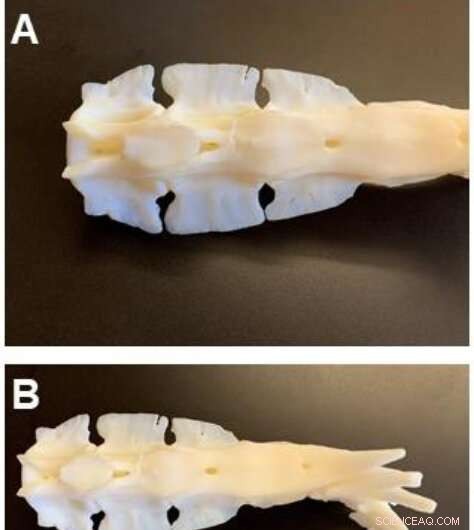
3D -udskrifter af caudal peduncle skelet (det område, hvor halefinnen fastgøres) i en albacore. Kredit:Zhu et al., Sci. Robot. 4, eaax4615 (2019)
Forholdet mellem biologi og robotteknologi er cirkulært, sagde Lauder. "En grund til, at jeg tror, vi har et succesfuldt forskningsprogram på dette område, er på grund af det store samspil mellem biologer og robotikere." Hver opdagelse i den ene gren informerer den anden, en form for uddannelsesmæssig feedback -loop, der konstant udvikler både videnskaben og teknik.
"Vi går ikke ud fra, at biologien har udviklet sig til den bedste løsning, " sagde Bart-Smith. "Disse fisk har haft lang tid om at udvikle sig til en løsning, der gør dem i stand til at overleve, specifikt, at spise, formere sig og ikke blive spist. Ubegrænset af disse krav, vi kan udelukkende fokusere på mekanismer og funktioner, der fremmer højere ydeevne, højere hastighed, højere effektivitet. Vores ultimative mål er at overgå biologien. Hvordan kan vi bygge noget, der ligner biologi, men svømmer hurtigere end noget, du ser derude i havet? "
 Varme artikler
Varme artikler
-
 Amazon optimistisk på Prime Day, trods tidlige fejlI denne 3. august, 2017, fil foto, Myrtice Harris påfører tape på en pakke inden forsendelse på et Amazon-udfyldningscenter i Baltimore. Amazons Prime Day starter den 16. juli, 2018, og vil være seks
Amazon optimistisk på Prime Day, trods tidlige fejlI denne 3. august, 2017, fil foto, Myrtice Harris påfører tape på en pakke inden forsendelse på et Amazon-udfyldningscenter i Baltimore. Amazons Prime Day starter den 16. juli, 2018, og vil være seks -
 AT&T lukker megafusion med Time WarnerAT&T og Time Warners advokat Daniel Petrocelli taler til pressen, efter at en domstol afgjorde, at fusionen på 85 milliarder dollar mellem AT&T og Time Warner kunne fortsætte. i Washington, DC, den 12
AT&T lukker megafusion med Time WarnerAT&T og Time Warners advokat Daniel Petrocelli taler til pressen, efter at en domstol afgjorde, at fusionen på 85 milliarder dollar mellem AT&T og Time Warner kunne fortsætte. i Washington, DC, den 12 -
 Frysekæmper:Varmere våddragt vil øge Navy dykketidFra venstre, kandidatstuderende Anton Cottrill, Dr. Jacopo Buongiorno og Dr. Michael Strano prøver deres neopren våddragter ved en pool i MITs atletikcenter. Cottrill holder tryktanken, der bruges til
Frysekæmper:Varmere våddragt vil øge Navy dykketidFra venstre, kandidatstuderende Anton Cottrill, Dr. Jacopo Buongiorno og Dr. Michael Strano prøver deres neopren våddragter ved en pool i MITs atletikcenter. Cottrill holder tryktanken, der bruges til -
 Airbnb tilføjer getaways i overensstemmelse med dyrerigetAirbnbs stigning fremkaldte alvorlig kritik blandt nogle, der siger, at det underminerer lokale hotelindustrier og presser leje- og ejendomsmarkeder for at gøre byer mindre overkommelige Airbnb be
Airbnb tilføjer getaways i overensstemmelse med dyrerigetAirbnbs stigning fremkaldte alvorlig kritik blandt nogle, der siger, at det underminerer lokale hotelindustrier og presser leje- og ejendomsmarkeder for at gøre byer mindre overkommelige Airbnb be
- Coronavirus-svar et stort eksperiment, der ændrer amerikanske arbejdspladser
- Globe havde det tredje varmeste år til dato, den femte varmeste november nogensinde
- For videnskabsmænd, ringvirkningerne af regeringens nedlukning breder sig stadig
- Landbrug med afgrøder med sten for at reducere CO2 og forbedre den globale fødevaresikkerhed
- Hvordan man laver planeterne og solsystemet med modellering Clay
- Sådan testes olieviskositet