


OpenAIs robothånd laver træk til Rubiks terning

Dem, der ved, hvor svært det er at få robothænder til at forstå, håndtag og manøvre vil gøre mere end at kigge – stirre, snarere - på den nylige video, der viser OpenAI Dactyl Rubiks terning.
At arbejde med en robothånd med fire fingre og tommelfinger er aldrig trivielt, når udfordringen er at demonstrere menneskelignende fingerfærdighed. OpenAIs hånd vinder anerkendende blikke med sine behændige fingermanipulationer, som en menneskelig hånd ville have brug for for at løse terningen.
De, der er bekendt med OpenAIs anden video, der blev postet sidste år, ville allerede vide om deres fremskridt, med videoen døbt Learning Dexterity. Videoen handlede om deres træning af en menneskelignende robothånd til at manipulere fysiske objekter. Allerede dengang følte de, at de kunne prale af, at robothånden kunne gøre dette med "hidtil uset behændighed."
Det var sådan de introducerede deres system, Dactyl. De sagde, at Dactyl lærer fra bunden ved hjælp af en generel forstærkningsindlæringsalgoritme og kode. "Vores resultater viser, at det er muligt at træne agenter i simulering og få dem til at løse opgaver i den virkelige verden, uden fysisk-nøjagtig modellering af verden."
En maskinlæringsingeniør fortalte videoseere, at teknikken blev døbt domænerandomisering.
De tilfældige, hvor hurtigt hånden kan bevæge sig, for eksempel, og hvor tung blokken er, og friktionen mellem blokken og hånden.
To kommentarer fra videoen for et år siden mente, at dette ikke rigtig var AI:"'AI' er egentlig bare abstrakte algoritmer på dette tidspunkt. Vi er ikke engang tæt på at forstå, hvad intelligens er, endsige, hvordan man syntetiserer det."
Den anden kommentar:"Dette er intet andet end smart programmering... ingen intelligens overhovedet. Dette er simpelthen en maskine, der gør, hvad den er blevet programmeret til at gøre på en runde måde. Bare programmer tingen til at dreje blokkene på den rigtige måde fra starten og spar dig selv for lidt tid og kræfter... En computer vil kun nogensinde gøre, hvad den er programmeret til at gøre."
Stadig, Karen Hao ind MIT Technology Review mente, at holdets robothånd var et vigtigt skridt mod mere agile robotter til industrielle og forbrugeranvendelser.
Spol frem til deres nye avis, "Løsning af Rubiks terning med en robothånd."
Forfatterne forklarede, at "Vi demonstrerer, at modeller, der kun er trænet i simulering, kan bruges til at løse et manipulationsproblem af hidtil uset kompleksitet på en rigtig robot. Dette er gjort muligt af to nøglekomponenter:en ny algoritme, som vi kalder automatisk domæne-randomisering (ADR) og en robotplatform bygget til maskinlæring."
De talte om deres kombinerede flip og top face rotation.
"En rotation svarer til at rotere en enkelt flade af Rubik's terningen med 90 grader i retningen med uret eller mod uret. En vending svarer til at flytte en anden flade af Rubik's terningen til toppen. Vi fandt, at rotation af den øverste flade var langt enklere end at rotere andre flader. i stedet for at rotere vilkårlige ansigter, vi kombinerer en flip og en topfladerotation for at udføre den ønskede operation. Disse delmål kan derefter udføres sekventielt for til sidst at løse Rubiks terning."
De adresserede enhver mistanke om, at de gav sig selv en uretfærdig fordel med en ideelt forvrænget terning.
"Sværhedsgraden ved at løse en Rubiks terning afhænger naturligvis af, hvor meget den har været scramblet før. Vi bruger den officielle scrambling-metode, som World Cube Association bruger til at opnå, hvad de refererer til som en fair scramble (omkring 20 træk, der anvendes til en løste Rubiks terning for at kryptere den).
Hvad tænkte andre robotikere om OpenAI-holdets hånd på en rulle med Rubiks puslespil?
Hao citerede Dmitry Berenson, en robotiker ved University of Michigan.
"Dette er et virkelig svært problem, " sagde han. "Den slags manipulation, der kræves for at rotere Rubik's terningens dele, er faktisk meget sværere end at rotere en terning."
Men hvad mener teamet, når de henviser til modeller, der er trænet i simulering? Karen Hao ind MIT Technology Review sagde, at de bygger en virtuel model af deres robot. De træner den virtuelt til at udføre opgaven. "Algoritmen lærer i sikkerheden i det digitale rum og kan efterfølgende overføres til en fysisk robot." Nu, nøglen til deres succes:Ho sagde "laboratoriet forvanskede de simulerede forhold i hver træningsrunde for at gøre algoritmen mere tilpasningsdygtig til forskellige muligheder."
De brugte (1) Shadow Dexterous E Series Hand som robothånd, (2) PhaseSpace motion capture-systemet til at spore de kartesiske koordinater for fingerspidserne og (3) tre RGB Basler-kameraer blev brugt til estimering af synsposer.
Hvad er det næste?
I en blog, teammedlemmer udtalte, at "Det er stadig ikke let at løse Rubik's Cube med en robothånd. Vores metode løser i øjeblikket Rubik's Cube 20 % af tiden, når der påføres en maksimalt vanskelig scramble, der kræver 26 ansigtsrotationer. For simplere scrambles, der kræver 15 rotationer til fortryde, succesraten er 60 %.
Ikke desto mindre, OpenAI handler ikke om at gå væk fra vanskeligheder. "Vi mener, at fingerfærdighed på menneskeligt niveau er på vej mod at bygge robotter til generelle formål, og vi er spændte på at skubbe fremad i denne retning."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 San Francisco for at kræve tilladelser til leje af scootereJack Handlery kører på en motoriseret scooter i San Francisco, Tirsdag, 17. april kl. 2018. San Francisco beordrer tre virksomheder, der lejer motoriserede scootere, til at stoppe med at fungere, indt
San Francisco for at kræve tilladelser til leje af scootereJack Handlery kører på en motoriseret scooter i San Francisco, Tirsdag, 17. april kl. 2018. San Francisco beordrer tre virksomheder, der lejer motoriserede scootere, til at stoppe med at fungere, indt -
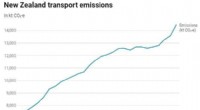 New Zealand var klar til at indføre standarder for rene biler og incitamenter til at reducere emiss…Kilde:New Zealand Greenhouse Gas Inventory Den newzealandske regering har foreslået nye brændstofstandarder for at reducere drivhusemissioner, sammen med forbrugerrabatter for renere biler-betalt
New Zealand var klar til at indføre standarder for rene biler og incitamenter til at reducere emiss…Kilde:New Zealand Greenhouse Gas Inventory Den newzealandske regering har foreslået nye brændstofstandarder for at reducere drivhusemissioner, sammen med forbrugerrabatter for renere biler-betalt -
 Ingeniører, zoologer afslører, hvordan måger vinge form for stabil svævningEt samarbejde mellem UTIAS-professor Philippe Lavoie og zoologer ved UBC har fastslået, at måger er i stand til at skifte over en bred vifte af vingeformer for at stabilisere glidning. Kredit:Christin
Ingeniører, zoologer afslører, hvordan måger vinge form for stabil svævningEt samarbejde mellem UTIAS-professor Philippe Lavoie og zoologer ved UBC har fastslået, at måger er i stand til at skifte over en bred vifte af vingeformer for at stabilisere glidning. Kredit:Christin -
 Minnesota flytter for at få flere elektriske køretøjer på vejeneKredit:CC0 Public Domain Minnesota vil kræve, at bilproducenter sælger flere elektriske køretøjer i staten fra og med modelåret 2023, Guvernør Tim Walz sagde onsdag, et skridt beregnet på at reduc
Minnesota flytter for at få flere elektriske køretøjer på vejeneKredit:CC0 Public Domain Minnesota vil kræve, at bilproducenter sælger flere elektriske køretøjer i staten fra og med modelåret 2023, Guvernør Tim Walz sagde onsdag, et skridt beregnet på at reduc
- Globale forsyningskæder som en måde at begrænse CO2-emissioner på
- Geologien bag 5 amerikanske vartegn
- En ny mikrorobot leverer medicin i kapsler
- Hvordan solsystemet fik sin store kløft, og hvorfor det betyder noget for livet på Jorden
- Gennemsigtig materiale med synligt lys
- Rystelse af sværmen - forskere undersøger, hvordan bier samarbejder om at stabilisere sværmklynge…