


Autonomt system forbedrer miljøprøvetagning til søs
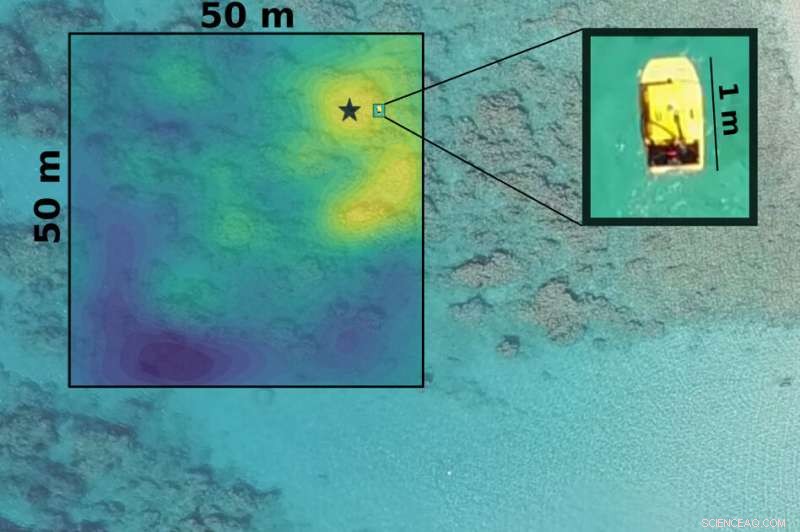
Selv i uudforskede farvande, et MIT-udviklet robotsystem kan effektivt opsnuse værdifulde, svært at finde steder at indsamle prøver fra. Ved implementering i autonome både indsat ud for Barbados kyst (billedet), systemet fandt hurtigt det mest udsatte koralhoved — hvilket betyder, at det var placeret på det laveste sted — hvilket er nyttigt til at studere, hvordan soleksponering påvirker koralorganismer. Kredit:Massachusetts Institute of Technology
Et autonomt robotsystem opfundet af forskere ved MIT og Woods Hole Oceanographic Institution (WHOI) opsnuser effektivt de mest videnskabeligt interessante - men svære at finde - prøveudtagningssteder i store, uudforskede farvande.
Miljøforskere er ofte interesserede i at indsamle prøver på de mest interessante steder, eller "maksima, "i et miljø. Et eksempel kunne være en kilde til lækkende kemikalier, hvor koncentrationen er højest og for det meste uspoleret af eksterne faktorer. Men et maksimum kan være enhver kvantificerbar værdi, som forskere ønsker at måle, vanddybde eller dele af koralrev, der er mest udsat for luft.
Bestræbelser på at implementere maksimalt søgende robotter lider under problemer med effektivitet og nøjagtighed. Almindeligvis robotter vil bevæge sig frem og tilbage som plæneklippere for at dække et område, hvilket er tidskrævende og samler mange uinteressante prøver. Nogle robotter fornemmer og følger spor i høj koncentration til deres lækagekilde. Men de kan blive vildledt. For eksempel, kemikalier kan blive fanget og ophobes i sprækker langt fra en kilde. Robotter kan identificere disse højkoncentrationspletter som kilden, men alligevel ikke være tæt på.
I et papir, der præsenteres på den internationale konference om intelligente robotter og systemer (IROS), forskerne beskriver "PLUMER, " et system, der gør det muligt for autonome mobile robotter at nulstille et maksimum langt hurtigere og mere effektivt. PLUMES udnytter probabilistiske teknikker til at forudsige, hvilke stier der sandsynligvis vil føre til det maksimale, mens du navigerer forhindringer, skiftende strømme, og andre variabler. Mens den indsamler prøver, den vejer det, den har lært, for at afgøre, om den skal fortsætte ad en lovende vej eller søge i det ukendte - som kan rumme mere værdifulde prøver.
Vigtigere, PLUMES når sin destination uden nogensinde at blive fanget i de vanskelige højkoncentrationssteder. "Det er vigtigt, fordi det er let at tro, at du har fundet guld, men du har virkelig fundet fjolsets guld, " siger medforfatter Victoria Preston, en ph.d. studerende i Computer Science and Artificial Intelligence Laboratory (CSAIL) og i MIT-WHOI Joint Program.
Forskerne byggede en PLUMES-drevet robotbåd, der med succes opdagede det mest udsatte koralhoved i Bellairs Fringing Reef i Barbados - hvilket betyder, det var placeret på det laveste sted - hvilket er nyttigt til at studere, hvordan soleksponering påvirker koralorganismer. I 100 simulerede forsøg i forskellige undervandsmiljøer, en virtuel PLUMES-robot indsamlede også konsekvent syv til otte gange flere prøver af maksima end traditionelle dækningsmetoder inden for tildelte tidsrammer.
"PLUMES udfører den minimale mængde udforskning, der er nødvendig for at finde maksimum og koncentrerer sig derefter hurtigt om at indsamle værdifulde prøver der, "siger co-første forfatter Genevieve Flaspohler, en ph.d. studerende og i CSAIL og MIT-WHOI Joint Program.
Med Preston og Flaspohler på papiret er:Anna P.M. Michel og Yogesh Girdhar, begge videnskabsmænd i Institut for Anvendt Oceanfysik og Engineering ved WHOI; og Nicholas Roy, en professor i CSAIL og i Institut for Luftfart og Astronautik.
Navigerer i en udnyttelse-udforsk-afvejning
En vigtig indsigt i PLUMES var at bruge teknikker fra sandsynlighed til fornuft om at navigere i den notorisk komplekse afvejning mellem at udnytte det, man har lært om miljøet, og at udforske ukendte områder, der kan være mere værdifulde.
"Den største udfordring i maksimal-søgning er at lade robotten balancere udnyttelse af information fra steder, den allerede ved har høje koncentrationer, og at udforske steder, den ikke ved meget om, " siger Flaspohler. "Hvis robotten udforsker for meget, det vil maksimalt ikke indsamle nok værdifulde prøver. Hvis den ikke udforsker nok, det kan helt gå glip af maksimum."
Faldt ind i et nyt miljø, en PLUMES-drevet robot bruger en sandsynlig statistisk model kaldet en gaussisk proces til at forudsige miljøvariabler, såsom kemiske koncentrationer, og estimere sanseusikkerheder. PLUMES genererer derefter en fordeling af mulige stier, robotten kan tage, og bruger de estimerede værdier og usikkerheder til at rangere hver sti efter, hvor godt den tillader robotten at udforske og udnytte.
I starten PLUMES vil vælge stier, der tilfældigt udforsker miljøet. Hver prøve, imidlertid, giver ny information om de målrettede værdier i det omgivende miljø - såsom pletter med højeste koncentrationer af kemikalier eller laveste dybder. Den Gaussiske procesmodel udnytter disse data til at indsnævre mulige stier, som robotten kan følge fra sin givne position til at sample fra steder med endnu højere værdi. PLUMES bruger en ny objektiv funktion - almindeligvis brugt i maskinlæring for at maksimere en belønning - til at ringe til, om robotten skal udnytte tidligere viden eller udforske det nye område.
"Hallucinerende" stier
Beslutningen om, hvor den næste prøve skal indsamles, afhænger af systemets evne til at "hallucinere" al mulig fremtidig handling fra dets nuværende placering. For at gøre det, det udnytter en modificeret version af Monte Carlo Tree Search (MCTS), en sti-planlægningsteknik populær til at drive kunstig intelligens-systemer, der mestrer komplekse spil, såsom Go og Chess.
MCTS bruger et beslutningstræ - et kort over tilsluttede noder og linjer - til at simulere en sti, eller rækkefølge af bevægelser, nødvendige for at nå frem til en endelig vinderaktion. Men i spil, pladsen til mulige stier er begrænset. I ukendte omgivelser, med skiftende dynamik i realtid, rummet er faktisk uendeligt, gør planlægning ekstremt vanskelig. Forskerne designet "kontinuerlig observation MCTS, " som udnytter den Gaussiske proces og den nye objektive funktion til at søge over dette uhåndterlige rum af mulige rigtige veje.
Roden til dette MCTS beslutningstræ starter med en "tro" -knude, hvilket er det næste øjeblikkelige skridt, robotten kan tage. Denne knude indeholder hele historien om robotens handlinger og observationer indtil det tidspunkt. Derefter, systemet udvider træet fra roden til nye linjer og noder, ser over flere trin af fremtidige handlinger, der fører til udforskede og uudforskede områder.
Derefter, systemet simulerer, hvad der ville ske, hvis det tog en prøve fra hver af de nygenererede noder, baseret på nogle mønstre, den har lært fra tidligere observationer. Afhængigt af værdien af den endelige simulerede knude, hele stien modtager en belønningsscore, med højere værdier svarende til mere lovende handlinger. Belønningsscore fra alle stier rulles tilbage til rodnoden. Robotten vælger den vej med den højeste score, tager et skridt, og samler en ægte prøve. Derefter, den bruger de rigtige data til at opdatere sin Gaussiske procesmodel og gentager "hallucinationsprocessen".
"Så længe systemet fortsætter med at hallucinere, at der kan være en højere værdi i usete dele af verden, den skal blive ved med at udforske, " siger Flaspohler. "Når det endelig konvergerer på et sted, vurderer det at være det maksimale, fordi den ikke kan hallucinere en højere værdi langs stien, så holder den op med at udforske."
Nu, forskerne samarbejder med forskere ved WHOI om at bruge PLUMES-drevne robotter til at lokalisere kemiske faner på vulkanske steder og studere metanudslip i smeltende kystmundinger i Arktis. Forskere er interesserede i kilden til kemiske gasser frigivet til atmosfæren, men disse teststeder kan strække sig over hundredvis af kvadratkilometer.
"De kan [bruge PLYMER til] at bruge mindre tid på at udforske det enorme område og virkelig koncentrere sig om at indsamle videnskabeligt værdifulde prøver, " siger Preston.
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 Flygtig visionær:Teslas Musk deler Wall StreetElon Musk besøger galas på Metropolitan Museum of Art i New York City, men har en kontroversiel offentlig persona Kedelige bonehead -spørgsmål er ikke fede. Næste? Tesla -chef Elon Musk klagede i
Flygtig visionær:Teslas Musk deler Wall StreetElon Musk besøger galas på Metropolitan Museum of Art i New York City, men har en kontroversiel offentlig persona Kedelige bonehead -spørgsmål er ikke fede. Næste? Tesla -chef Elon Musk klagede i -
 Amerikanske mellemstatslige motorveje trænger til eftersyn, siger ny rapportKredit:CC0 Public Domain Fremtiden for US Interstate Highway System er truet af et vedvarende og voksende efterslæb af strukturelle og operationelle mangler og af forskellige truende udfordringer,
Amerikanske mellemstatslige motorveje trænger til eftersyn, siger ny rapportKredit:CC0 Public Domain Fremtiden for US Interstate Highway System er truet af et vedvarende og voksende efterslæb af strukturelle og operationelle mangler og af forskellige truende udfordringer, -
 To-benet robot efterligner menneskelig balance, mens du løber og hopperJoao Ramos teleopererer Little HERMES, en tobenet robot, der kan efterligne en operatørs balance for at forblive oprejst under løb, gå, og hopper på plads. Kredit:Joao Ramos og Sangbae Kim Redning
To-benet robot efterligner menneskelig balance, mens du løber og hopperJoao Ramos teleopererer Little HERMES, en tobenet robot, der kan efterligne en operatørs balance for at forblive oprejst under løb, gå, og hopper på plads. Kredit:Joao Ramos og Sangbae Kim Redning -
 Facebook lukker hundredvis af uægte Rusland-linkede siderFacebook er kommet under intenst pres fra en bølge af skandaler, hovedsageligt over deling af sine brugeres data uden deres samtykke, men også over voldsomme russiske falske nyheder-påvirkningskampagn
Facebook lukker hundredvis af uægte Rusland-linkede siderFacebook er kommet under intenst pres fra en bølge af skandaler, hovedsageligt over deling af sine brugeres data uden deres samtykke, men også over voldsomme russiske falske nyheder-påvirkningskampagn
- Silicium Sachsen står på fundamenter lagt under Østtyskland
- NASA opdager den kortvarige tropiske cyklon Maarutha
- Sådan konverteres 4.0 System til 100 Point Ratings System
- Britiske myndigheder giver Amazon 5 dage til ny Deliveroo -plan
- Hvordan laver du verdens mest kraftfulde neutrinostråle?
- Sådan bruges en Trend Line Equation til at finde en forventet værdi