


Flere spiralformede magnetiske bløde robotter bringer os tættere på at forstå kollektiv adfærd
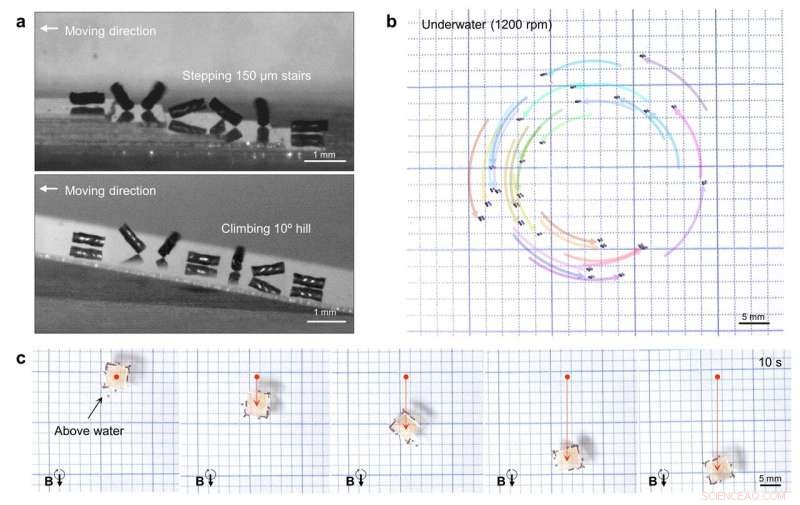
Hierarkisk magnetomotilitet drevet af roterende og roterende bevægelser af spiralmagnetiske bløde robotter tillader (a) at klatre over forhindringer, (b) undervandssvømning af flere bløde robotter, og (c) kollektiv transport af last via en enkelt roterende akse af permanente magneter. Kredit:Inha University
Magnetiske bløde robotter er en lovende mulighed for kontaktløs kontrol i begrænsede omgivelser via eksterne magnetiske stimuli. Magneto-inducerede bevægelser, dvs. magnetomotilitet, drives af lokal deformation af en robot, hvorved partikeljusteringer og skiftende polære fordelinger programmeres ind i kroppen. Forsøg på at programmere magnetisk anisotropi i de bløde robotter er blevet udført gennem direkte laserprint (DLP), stereolitografi (SLA) og smeltet filamentfabrikation (FDM) kombineret med multiaksial manipulation af elektromagneter.
Nu, forskere har demonstreret lette forberedelses- og aktiveringsmetoder for magnetiske bløde robotter uden elektromagnetisk regulering. De konstruerede en tredimensionel spiralformet blød robot gennem vridning af en todimensionel polymerkompositfilm. Termoplastiske polyurethan-magnetit nanokompositter tillod super-snoning af filmene på grund af høj forlængelse; brug af termoplastiske materialer gjorde det også muligt for den snoede arkitektur at blive termisk fikseret. Det tætte spiralformede legeme af magnetiske bløde robotter tillod hierarkisk magnetomotilitet, inklusive rotationer med uret og omdrejninger mod uret som følge af to permanente magneter med en enkelt rotationsakse, der roterer med uret under substraterne.
Ved magnetisk manipulation af flere bløde robotter, styring af den enkelte robot forbliver en indviklet manøvre, da den respektive bane for hver robot samtidig koordineres langs forskellige veje. Batterifri drift af disse multiple magnetiske bløde robotter blev udført gennem variationer i frekvenserne af de roterende magneter i planet, da bløde robotter med forskellige aspektforhold blev aktiveret med andre rotationstilstande - roterende, drejende, og tumbling - selv ved identisk rotationshastighed. Ud over orbital manøvrering af radier, hastigheder, og stier for de mange bløde robotter, adræt bevægelse op til 60 kropslængder s-1 og hierarkisk magnetomotilitet hjalp de bløde robotter med at forcere forhindringer såsom trapper, bakker og rynkede overflader under en evigt roterende magnetisk kilde og uden multi-retningsregulering af magnetiske felter.
Forskerne demonstrerede også samarbejde mellem flere magnetiske bløde robotter inspireret af den kollektive kvalitet af godstransport i myrekolonier. Kollektiv adfærd er en almindelig observation i naturen med eksempler fundet i cellemigration, myrekolonier, og fiskestimer, for at nævne et par stykker. Imidlertid, det er svært at opnå dette design i kollektive robotter, fordi dynamikken i både individuelle og kollektive robotbevægelser skal optimeres ud fra både beregningsmæssige og eksperimentelle analyser. Disse krav bliver unødvendige i denne undersøgelse, som kapillærkræfter virker til at fastgøre de roterende og roterende bløde robotter omkring lasten. Flytningen af magneterne under robotterne resulterer i lettere transport af tunge genstande svarende til myrernes arbejdsadfærd.
Disse nye teknikker til on-demand orbital manøvrering via hierarkisk magnetomotilitet kan udvides til biomedicinske applikationer, hvor miniaturiserede magnetiske svømmere potentielt kan levere medicin til rum med komplekse konfigurationer.
 Varme artikler
Varme artikler
-
 Robotter skabt med 3D-printere kunne passe på dem i gyldne årPurdue -forskere har udviklet en ny designmetode, der gør det muligt for alle hurtigt at designe og fremstille bløde robotter ved hjælp af en 3D -printer. Kredit:Ramses Martinez/Purdue University
Robotter skabt med 3D-printere kunne passe på dem i gyldne årPurdue -forskere har udviklet en ny designmetode, der gør det muligt for alle hurtigt at designe og fremstille bløde robotter ved hjælp af en 3D -printer. Kredit:Ramses Martinez/Purdue University -
 Boeing rapporterer endnu et stort fald i leverancerne i 3QBoeing leverede kun 63 kommercielle fly i forhold til 190 for et år siden, på grund af jordforbindelsen af dets topsælgende 737 MAX, som fortsat buler resultaterne Boeing rapporterede tirsdag en
Boeing rapporterer endnu et stort fald i leverancerne i 3QBoeing leverede kun 63 kommercielle fly i forhold til 190 for et år siden, på grund af jordforbindelsen af dets topsælgende 737 MAX, som fortsat buler resultaterne Boeing rapporterede tirsdag en -
 Den sociale virksomhed Ricult bruger digitale værktøjer til at styrke landmændene i udviklingslan…Ricults grundlæggere siger, at deres mobile platform har hjulpet småbønder i Pakistan og Thailand med at øge deres afgrødeudbytte med 50 procent, gennemsnitlig. Kredit:Ricult Mere end halvdelen af
Den sociale virksomhed Ricult bruger digitale værktøjer til at styrke landmændene i udviklingslan…Ricults grundlæggere siger, at deres mobile platform har hjulpet småbønder i Pakistan og Thailand med at øge deres afgrødeudbytte med 50 procent, gennemsnitlig. Kredit:Ricult Mere end halvdelen af -
 Twitter angriber automatiserede botkontiTwitter sagde, at det slår ned på bots eller automatiserede konti som dem, der forsøgte at manipulere følelser under valgkampen i 2016 i USA Twitter meddelte onsdag et nedslag i konti drevet af so
Twitter angriber automatiserede botkontiTwitter sagde, at det slår ned på bots eller automatiserede konti som dem, der forsøgte at manipulere følelser under valgkampen i 2016 i USA Twitter meddelte onsdag et nedslag i konti drevet af so
- Dannelse af cellemembrankomponentdomæner i kunstige lipid -dobbeltlag
- Hvad er de forskellige typer af atomer?
- Frygtede kunder, der er følsomme over for størrelsen og omfanget af et databrud, mens vrede kunder…
- Carlos Ghosn, bilverdenen koster dræber
- Mites That Fly & Bite
- NASA-satellitter giver en termisk udsigt orkanen Nate efter landfald