


En multi-objektiv optimeringsmetode til socialt bevidst robotnavigation
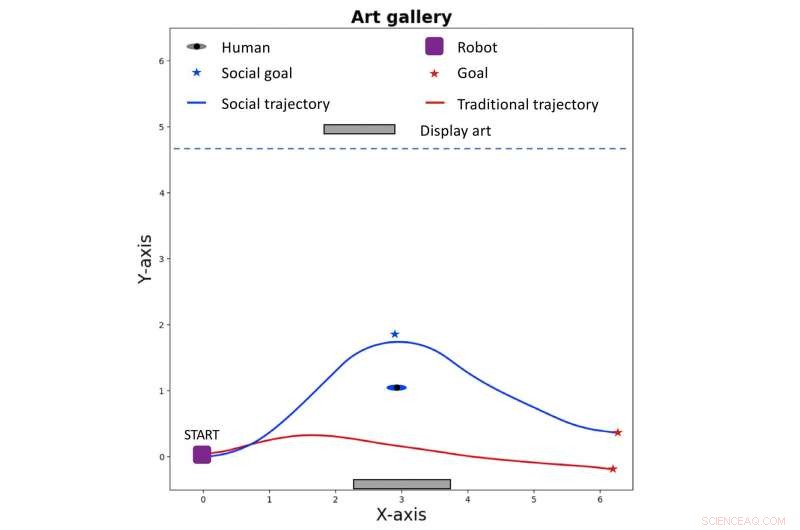
En mobil robot under hensyntagen til aktivitetsrum i et kunstgalleri, hvor robotten med SAN -planlægger undgår at gå ind i aktivitetsrummet, repræsenteret af den blå bane. Kredit:Banisetty et al.
Mobilrobotter er efterhånden på vej ind i en række mennesker befolkede miljøer, herunder hospitaler, indkøbscentre og folks hjem. For at disse robotter kan interagere med mennesker i deres omgivelser, de bør respektere en række uudtalte sociale normer, der er forbundet med at dele et givet miljø med andre.
Med det i tankerne, forskere ved University of Nevada, Reno har for nylig udviklet en ikke-lineær, multi-objektiv optimeringsmetode, der kunne muliggøre socialt bevidst navigation i mobile robotter. Denne tilgang, først skitseret i et papir fremlagt på 2018 International Conference on Robots and Systems (IROS) og nu offentliggjort på arXiv, sikrer, at robotter ikke invaderer menneskers personlige rum i deres omgivelser, samtidig med at det muliggør mere effektive mennesker-robot-interaktioner (HRI'er) i flere scenarier.
"Denne forskning begyndte oprindeligt som en del af mit afhandlingsarbejde med robotter og børn, "David Feil-Seifer, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Tidligere arbejde involverede udvikling af en robot til miljøer, hvor vi ønskede, at en robot skulle interagere med børn. I dette tilfælde, vi havde robotten til at tage den mest 'effektive' vej ved hjælp af de metrics, der normalt bruges i planlægning af robotstier (minimering af tiden for en bevægelse, minimere den tilbagelagte afstand, ikke rammer noget). "
I en tidligere undersøgelse offentliggjort i Journal of Human-Robot Interaction , Feil-Seifer og hans kolleger forsøgte at udvikle robotnavigeringsadfærd for miljøer, der er befolket af børn. Pilotarbejde viste, at robotten var effektiv til at nå sin ønskede placering uden at ramme noget, men forskerne observerede, at børnene typisk reagerede dårligt på robotten.
Faktisk, robotten, der blev brugt i deres eksperimenter, ville generelt vende sig væk fra børn og bevæge sig så hurtigt som muligt mod den ønskede placering. Som en konsekvens af denne adfærd, børnene troede, at robotten ikke ønskede at interagere med dem.
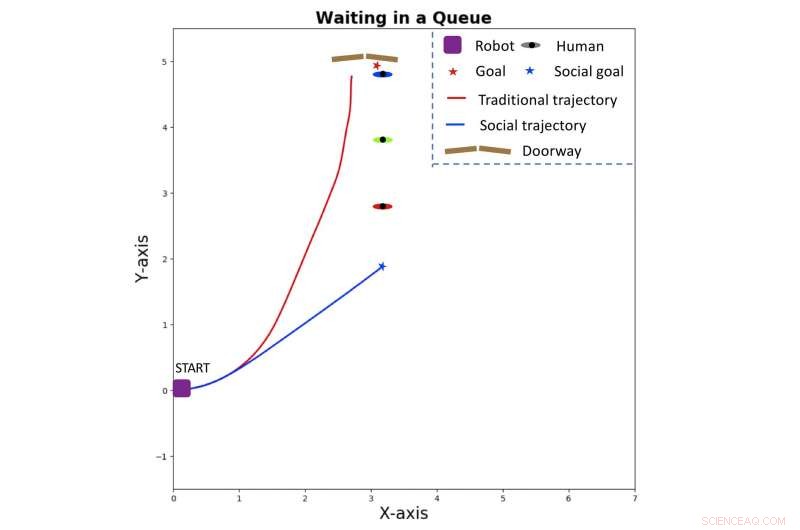
En mobil robot slutter sig til et fingerpeg, dannet foran et døråbningsscenario. Den traditionelle planlægger genererede den røde bane, at lede robotten til et sted ved siden af den første person (upassende), at skære linjen. Den blå bane, vores foreslåede tilgang, fører robotten til at slutte sig til linjen (passende). Kredit:Banisetty et al.
"Vi observerede robotten og så, at den ikke rigtig bevægede sig, som en person gør, indsamling af social information og brug af den til at hjælpe med dens planlægning, "Feil-Seifer sagde." Vi besluttede derfor at lave en navigationsplanlægger, der kan bruge oplysninger om social afstand for at udføre socialt passende bevægelser. "
I den samme tidligere undersøgelse, Feil-Seifer og hans kolleger tillod robotten med succes at afgøre, om en planlagt bevægelse var socialt passende ved hjælp af en simpel matematisk metode kaldet Gaussian blandingsmodeller (GMM'er). Denne metode fungerede godt i situationer, hvor sociale faktorer let kunne forstås og repræsenteres ved hjælp af en simpel lineær matematisk model.
Da de fleste virkelige sociale interaktioner involverer flere faktorer, der er svære at passe ind i en lineær model, imidlertid, den enkle metode, de udviklede, ville ikke generalisere godt på tværs af forskellige sociale situationer, og i mange tilfælde, det ville slet ikke fungere. I deres nye undersøgelse, forskerne besluttede således at opdatere den planlægger, de tidligere udviklede for at optimere robotens planlagte bevægelser, redegør for de ikke-lineære forhold mellem de forskellige sociale egenskaber, som de ville have robotten til at overveje. Dette indebar brug af en Pareto konkavitet elimination transformation (PaCcET) -aktiveret planlægger.
"De vigtigste fordele ved vores tilgang er, at den kan tage disse ikke-lineære forhold mellem de forskellige sociale faktorer (dvs. hvor du er på en gang, hvor du er i forhold til andre mennesker, hvor tæt du er på dit mål, osv.) taget i betragtning, "Sagde Feil-Seifer.
Feil-Seifer og hans kolleger anvendte deres ikke-lineære optimeringsmetode til flere scenarier, hvor en robot skulle respektere sociale normer, for eksempel, ved ikke at invadere folks personlige rum. De fandt ud af, at deres tilgang fungerede godt i mange af disse scenarier, herunder interaktioner på en gang, i et kunstgalleri eller mens du venter i en kø.
"Vi har endnu ikke foretaget en direkte sammenligning med andre socialt bevidste navigationsplanlæggere; det er planlagt for fremtiden, "Sagde Feil-Seifer." Men sammenlignet med en traditionel planlægger, der ikke overvejer social dynamik, robotten giver en person meget mere plads, når han passerer dem på gangen, samtidig med at vi fortsat fortsætter mod et ønsket mål. "
I deres seneste undersøgelse, forskerne evaluerede deres tilgang i 2-D-simuleringer på en simuleret PR2-robot og i den virkelige verden på en pioneer-3DX mobilrobot. Deres fund tyder på, at deres tilgang kan håndtere flere interaktionsscenarier, der involverer både holonomiske og ikke-holonomiske robotter.
"Praktisk talt, dette indledende papir viser, at denne metode kan fungere, i det mindste i et simuleret miljø, "Feil-Seifer sagde." Senere arbejde har demonstreret dette i den virkelige verden og en lang række sociale scenarier, der overvejer både andre mennesker og faktorer, der er relateret til robotens miljø (dvs. steder af interesse, såsom malerier på en væg), der også vedrører at være socialt bevidst. "
Samlet set, arbejdet udført af Feil-Seifer og hans kolleger fremhæver behovet for at udvikle værktøjer til at gøre robotter mere socialt bevidste for at sikre, at de ikke gør folk utilpas og dermed letter deres integration i samfundet. I fremtiden, den ikke-lineære optimeringsmetode, de udviklede, kunne i sidste ende forenkle vedtagelsen af mobile robotter på kontorer, hospitaler og en række andre miljøer.
"Vi fortsætter nu med at udvide mulighederne for vores socialt bevidste navigationsplanlægger (SAN) til at omfatte en bredere vifte af sociale interaktioner for bedre at forstå den sociale kontekst, så den korrekt kan beslutte, hvilke mål der skal prioriteres, og for at få systemet til at fungere mere robust, "Feil-Seifer sagde." Vi planlægger også at undersøge de direkte virkninger, som socialt bevidst navigation har på mennesker, der observerer interaktionen, og hvordan det påvirker deres opfattelse af robotten, da dette ville hjælpe med at validere nødvendigheden af socialt bevidst navigation. "
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Finjustering af vedvarende energi kan hjælpe Texas med at balancere energiressourcerneEn undersøgelse fra Rice University analyserer Texas blanding af vind- og solenergiressourcer, og hvordan man opnår en bedre balance mellem dem fremadrettet. Kredit:U.S. Air Force/Wikipedia Timing
Finjustering af vedvarende energi kan hjælpe Texas med at balancere energiressourcerneEn undersøgelse fra Rice University analyserer Texas blanding af vind- og solenergiressourcer, og hvordan man opnår en bedre balance mellem dem fremadrettet. Kredit:U.S. Air Force/Wikipedia Timing -
 En ny datakomprimeringsteknik til hurtigere computerprogrammerEn ny teknik udviklet af MIT -forskere komprimerer objekter i hukommelsen for første gang, frigør mere hukommelse, der bruges af computere, så de kan køre hurtigere og udføre flere opgaver samtidigt.
En ny datakomprimeringsteknik til hurtigere computerprogrammerEn ny teknik udviklet af MIT -forskere komprimerer objekter i hukommelsen for første gang, frigør mere hukommelse, der bruges af computere, så de kan køre hurtigere og udføre flere opgaver samtidigt. -
 GM elbiler kan betyde færre og lavere betalte jobDenne onsdag, 17. okt. 2018 filfoto viser en Chevrolet Volt hybridbil, der oplader på en ChargePoint -ladestation ved en parkeringshus i Los Angeles. Hvis amerikanske forbrugere nogensinde dropper bræ
GM elbiler kan betyde færre og lavere betalte jobDenne onsdag, 17. okt. 2018 filfoto viser en Chevrolet Volt hybridbil, der oplader på en ChargePoint -ladestation ved en parkeringshus i Los Angeles. Hvis amerikanske forbrugere nogensinde dropper bræ -
 Daimler tilbyder hjulet til den nye administrerende direktør midt i et vanskeligt gearskifteDieter Zetsche overrakte onsdag rattet i Mercedes-Benz-producenten Daimler til sin svenske efterfølger Ola Kallenius. Den flamboyante Daimler-boss, Dieter Zetsche, blev sat ud efter 13 år i onsdag
Daimler tilbyder hjulet til den nye administrerende direktør midt i et vanskeligt gearskifteDieter Zetsche overrakte onsdag rattet i Mercedes-Benz-producenten Daimler til sin svenske efterfølger Ola Kallenius. Den flamboyante Daimler-boss, Dieter Zetsche, blev sat ud efter 13 år i onsdag
- Ny NIST-køreplan viser vej til reducerede brandfarer fra materialer
- Strandenes kapacitet til at synke kulstof kan være truet af nitrogenforurening
- Effekten af silica på dampturbiner
- Ny teknik kunne bringe kvalitetskontrolværktøj til nanokompositter
- Billede:NASAs IceBridge undersøger gletschere i det nordøstlige Grønland
- Farverige klitter på vindomsuste Mars