


Selvkørende mikrorobotter
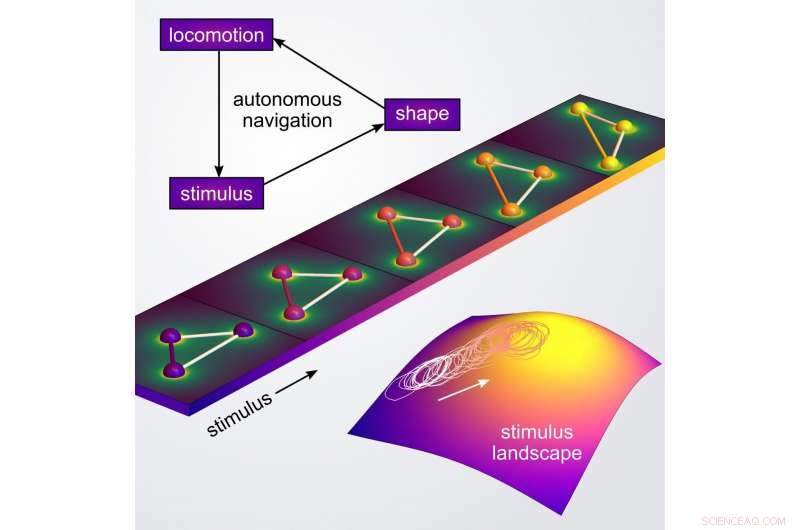
En skematisk oversigt over autonom navigationsmekanisme via shapeshifting Kredit:Yong Dou/Columbia Engineering
De fleste syntetiske materialer, herunder dem i batterielektroder, polymermembraner, og katalysatorer, nedbrydes over tid, fordi de ikke har interne reparationsmekanismer. Hvis du kunne distribuere autonome mikrorobotter inden for disse materialer, så kunne du bruge mikrorobotterne til løbende at foretage reparationer indefra. En ny undersøgelse fra laboratoriet af Kyle Bishop, lektor i kemiteknik, foreslår en strategi for mikroskala -robotter, der kan fornemme symptomer på en materialefejl og navigere autonomt til defektstedet, hvor korrigerende handlinger kunne udføres. Undersøgelsen blev offentliggjort i Fysisk gennemgangsforskning 2. december kl. 2019.
Svømmebakterier leder efter områder med høj næringsstofkoncentration ved at integrere kemiske sensorer og molekylære motorer, meget gerne en selvkørende bil, der bruger oplysninger fra kameraer og andre sensorer til at vælge en passende handling for at nå sin destination. Forskere har forsøgt at efterligne denne adfærd ved at bruge små partikler, der drives af kemiske brændstoffer eller andre energitilførsler. Mens rumlige variationer i miljøet (f.eks. i brændstofkoncentrationen) kan virke til fysisk orientering af partiklen og derved styre dens bevægelse, denne type navigation har begrænsninger.
"Eksisterende selvkørende partikler ligner mere et løbsk tog, der mekanisk styres af de snoede skinner end en selvkørende bil, der autonomt styres af sensoriske oplysninger, "siger biskop." Vi spekulerede på, om vi kunne designe mikroskala robotter med materialesensorer og aktuatorer, der navigerer mere som bakterier. "
Bishop's team udvikler en ny tilgang til kodning af den autonome navigation af mikrorobotter, der er baseret på formskiftende materialer. Lokale træk ved miljøet, såsom temperatur eller pH, bestemme partikelens tredimensionelle form, som igen påvirker dens selvkørende bevægelse. Ved at kontrollere partikelens form og dens reaktion på miljøændringer, forskerne modellerer, hvordan mikrorobotter kan konstrueres til at svømme op eller ned af stimulusgradienter, selv dem, der er for svage til at mærkes direkte af partiklen.
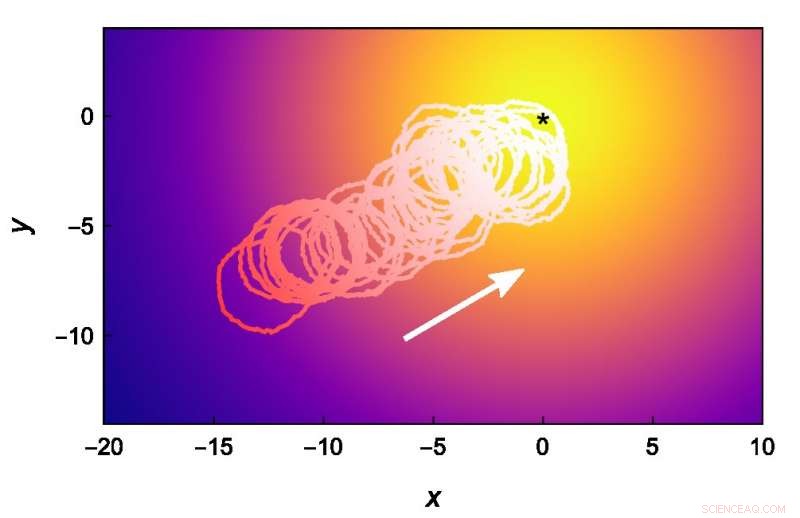
Simuleret navigationsbane i støj og komplekse miljøer. Kredit:Yong Dou/Columbia Engineering
"For første gang, vi viser, hvordan responsive materialer kan bruges som indbyggede computere til mikroskalerobotter, mindre end tykkelsen af et menneskehår, der er programmeret til at navigere autonomt, "siger Yong Dou, en medforfatter af undersøgelsen og en ph.d. elev i Bishop's lab. "Sådanne mikrorobotter kunne udføre mere komplekse opgaver såsom distribueret registrering af materialefejl, autonom levering af terapeutisk last, og efter behov reparationer af materialer, celler, eller væv. "
Bishop's team opretter nu eksperimenter for i praksis at demonstrere deres teoretiske navigationsstrategi for mikrorobotter, ved hjælp af formskiftende materialer såsom flydende krystalelastomerer og formhukommelseslegeringer. De forventer at vise, at eksperimenterne vil bevise, at stimuli-responsive, formskiftende mikropartikler kan bruge manipuleret feedback mellem sansning og bevægelse til at navigere autonomt.
 Varme artikler
Varme artikler
-
 Eksperimentelt hjernestyret høreapparat afkoder, identificerer, hvem du vil høreDr. Mesgranis eksperimentelle hjernekontrollerede høreapparat (afbildet på skærmen) tilbyder en lovende løsning på cocktailpartyproblemet, der plager nutidens høreapparater. Kredit:Diane Bondareff for
Eksperimentelt hjernestyret høreapparat afkoder, identificerer, hvem du vil høreDr. Mesgranis eksperimentelle hjernekontrollerede høreapparat (afbildet på skærmen) tilbyder en lovende løsning på cocktailpartyproblemet, der plager nutidens høreapparater. Kredit:Diane Bondareff for -
 End of the road:Dyson stopper race for at lave elbilerDen britiske industridesigningeniør James Dyson sagde, at hans firmas elbilprojekt ikke var kommercielt levedygtigt Den britiske opfinder James Dyson er droppet ud af kapløbet om at producere elbi
End of the road:Dyson stopper race for at lave elbilerDen britiske industridesigningeniør James Dyson sagde, at hans firmas elbilprojekt ikke var kommercielt levedygtigt Den britiske opfinder James Dyson er droppet ud af kapløbet om at producere elbi -
 Facebook forsvarer at spore alle dine træk - selvom appen ikke er tændtKredit:CC0 Public Domain Forventende spørgsmål fra brugerne om, hvorfor de bliver sporet af Facebook, da Google (Android) og Apple (iOS) frigiver nye operativsystemer, det sociale netværk tog til
Facebook forsvarer at spore alle dine træk - selvom appen ikke er tændtKredit:CC0 Public Domain Forventende spørgsmål fra brugerne om, hvorfor de bliver sporet af Facebook, da Google (Android) og Apple (iOS) frigiver nye operativsystemer, det sociale netværk tog til -
 Naturlige spektrallinjerKredit:CC0 Public Domain Visse frekvensområder på tværs af det elektromagnetiske spektrum er reserveret af regulatorer til særlige applikationer:TV, digital radio, Trådløst internet, Bluetooth osv
Naturlige spektrallinjerKredit:CC0 Public Domain Visse frekvensområder på tværs af det elektromagnetiske spektrum er reserveret af regulatorer til særlige applikationer:TV, digital radio, Trådløst internet, Bluetooth osv
- Leder af Tesla Autopilot-projektet tager til Intel
- Når gode brusere bliver dårlige - Leoniderne fra 2016
- Sådan beregnes tiden for Cell Doubling
- Håb til en af verdens sjældneste primater:Første folketælling af Zanzibar Red Colobus abe
- NASAs første billede af Mars fra en CubeSat
- Fra pedicure til Peregrine raketten, paraffinvoks beviser sit værd