


Collaborativ samtidig lokalisering og kortlægningsteknik bruger tilgængelige Wi-Fi-netværk
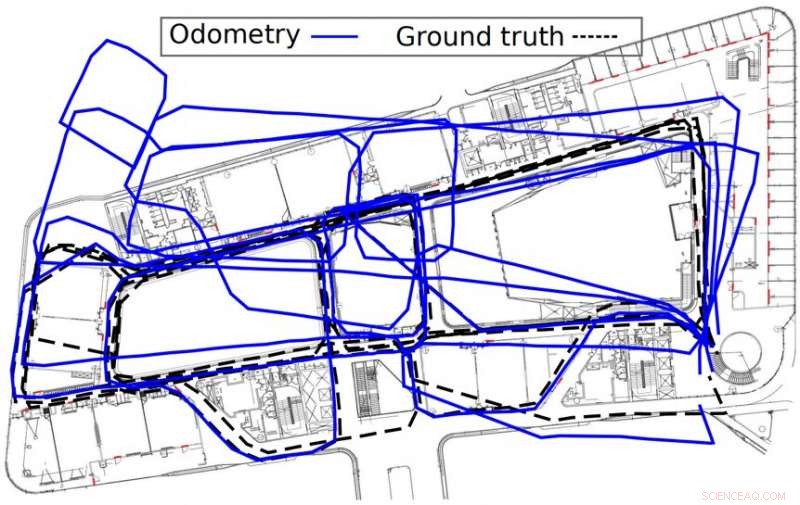
Figur, der viser, hvordan ground sand -tilgange sammenligner med kilometerteknikker. Kredit:Liu et al.
I de seneste år, forskerhold verden over har udviklet nye metoder til samtidig lokalisering og kortlægning (SLAM). Disse teknikker kan bruges til at konstruere eller opdatere kort over et givet miljø i realtid, samtidig med at en kunstig agent eller robot placeres inden for disse kort.
De fleste eksisterende SLAM-tilgange er stærkt afhængige af brugen af rækkeviddebaserede eller synsbaserede sensorer, både for at mærke miljøet og en robots bevægelser. Disse sensorer, imidlertid, kan være meget dyrt og typisk kræve betydelig computerkraft for at fungere korrekt.
Kendt til disse begrænsninger, forskere ved Singapore University of Technology and Design, Southwest University of Science and Technology, University of Moratuwa og Nanyang Technological University har for nylig udviklet en ny teknik til samarbejdende SLAM, der er afhængig af rækkeviddebaserede eller visionbaserede sensorer. Denne teknik, præsenteret i et papir, der er udgivet på arXiv, kunne muliggøre mere effektiv robotnavigation inden for ukendte indendørsmiljøer til en pris, der er væsentligt lavere end for de fleste tidligere foreslåede metoder.
"Vi havde til formål at udnytte billige og lave beregningssensorer som erstatning for rækkeviddebaserede eller visuelt baserede sensorer, "Chau Yuen, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Da moderne bygninger typisk har Wi-Fi-netværksdækning, vores mål er at udnytte sådanne frit tilgængelige oplysninger til at udføre SLAM. "
For at udnytte radiofunktioner, der er let tilgængelige i de fleste bymiljøer, forskerne udviklede en tilgang til samtidig lokalisering og kortlægning af radiofingeraftryk kaldet C-SLAM-RF. Deres teknik fungerer ved at crowdsensere Wi-Fi-målinger i store indendørs miljøer og derefter bruge disse målinger til at generere kort eller lokalisere kunstige agenter.
"Vores mål er at generere et radiokort over miljøet med den mindst mulige menneskelige indsats ved at udnytte indbyggede sansemuligheder for almindeligt anvendte smarttelefoner, "Forklarede Yuen.
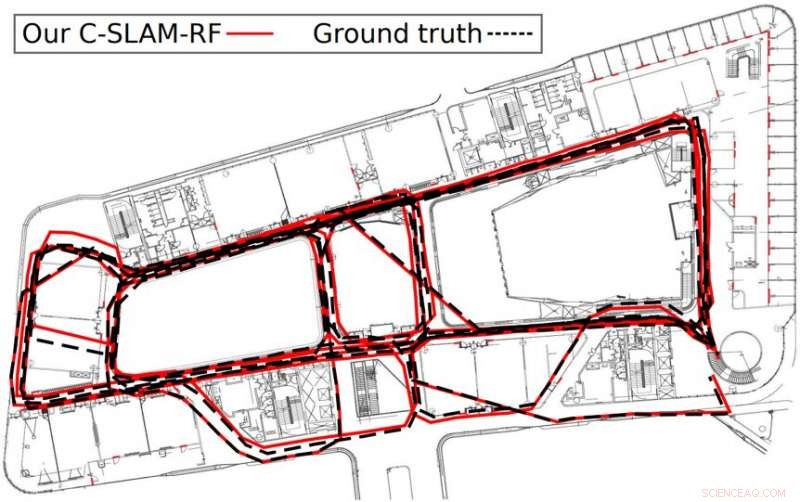
Figur, der viser, hvordan estimerede vejtilgange kan sammenlignes med SLAM -teknikken udviklet af forskerne. Kredit:Liu et al.
Systemet udviklet af Yuen og hans kolleger modtager information om styrken af signalet fra allerede eksisterende Wi-Fi-adgangspunkter spredt rundt i et givet miljø, såvel som fra fodgængere dødregning (PDR) processer (dvs. beregninger af en persons nuværende position) afledt af en smartphone. Det bruger derefter disse signaler til at opbygge et kort over miljøet uden at kræve forudgående kendskab til miljøet eller fordelingen af adgangspunkterne i det. C-SLAM-RF-værktøjet, som forskerne har udtænkt, kan også afgøre, om robotten er vendt tilbage til et tidligere besøgt sted, kendt som "loop lukning, "ved at vurdere ligheden mellem forskellige signalers radiofingeraftryk.
"Eksisterende SLAM -tilgange bruger ofte dedikerede enheder, for eksempel, visuelle kameraer eller rækkeviddebaserede LIDAR-sensorer, at måle ligheden mellem observationer ved scanningstilpasning eller funktionsmatchning, som er beregningsmæssigt dyre, "U-Xuan Tan, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Vores løsning udnytter muligheden for at udføre lokalisering og kortlægning til billige, allestedsnærværende IoT -enheder som smartphones, på grund af stigende popularitet for trådløse Wi-Fi-netværk. "
Yuen, Tan og deres kolleger testede deres teknik i et indendørs miljø med et areal på 130 meter x 70 meter. Deres resultater var meget lovende, da deres systems ydeevne oversteg den for flere andre eksisterende teknikker til SLAM, ofte med en betydelig margin.
"Vi evaluerede vores tilgang i store miljøer, og en positioneringsnøjagtighed på 0,6 meter opnås uden forudgående kendskab til miljøet, "Ran Liu, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Denne nøjagtighed overgår den state-of-the-art fingeraftryksbaserede lokaliseringsmetode, hvilket kræver en kedelig undersøgelse af miljøet. Den beregningstid, der kræves af vores tilgang, er ubetydelig i forhold til den rækkeviddebaserede eller visuelle SLAM. "
I fremtiden, tilgangen til kollaborativ SLAM, der blev udformet af dette forskerteam, kunne bidrage til at forbedre robotnavigation i ukendte miljøer. Ud over, det faktum, at det ikke kræver brug af dyre sensorer og er afhængig af eksisterende Wi-Fi-hotspots, gør det til en mere gennemførlig løsning til store implementeringer.
"Vi vil nu gerne undersøge muligheden for at fusionere forskellige radiosignaler, for eksempel cellulært signal, for at forbedre positioneringsnøjagtigheden, "Yong Liang Guan, en anden forsker involveret i undersøgelsen, fortalte TechXplor. "En anden plan er at bruge det producerede radiokort til lokaliseringsformål. En kombination med andre sensorer, for eksempel laserafstandsmålere til at accelerere og forbedre kortlægningen i store miljøer, vil også være en af vores fremtidige undersøgelser."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 De etiske udfordringer ved digital identitetKredit:CC0 Public Domain GDPR trådte for nylig i kraft, bekræfter Europas rolle som eksempel inden for beskyttelse af personoplysninger. Imidlertid, vi må ikke lade det afholde os fra at undersøge
De etiske udfordringer ved digital identitetKredit:CC0 Public Domain GDPR trådte for nylig i kraft, bekræfter Europas rolle som eksempel inden for beskyttelse af personoplysninger. Imidlertid, vi må ikke lade det afholde os fra at undersøge -
 Spanien godkender den anfægtede databeskyttelseslovDet spanske senat godkendte en lov, som har til formål at få spansk lov til at overholde EUs generelle databeskyttelsesforordning Det spanske senat godkendte onsdag en kontroversiel onlinedatabesk
Spanien godkender den anfægtede databeskyttelseslovDet spanske senat godkendte en lov, som har til formål at få spansk lov til at overholde EUs generelle databeskyttelsesforordning Det spanske senat godkendte onsdag en kontroversiel onlinedatabesk -
 Se under motorhjelmen i batterierDet højeffektive RIXS-system på Advanced Light Sources Beamline 8.0.1. Kredit:Marilyn Sargent/Berkeley Lab Fra næste generations smartphones til elbiler med længere rækkevidde og et forbedret elne
Se under motorhjelmen i batterierDet højeffektive RIXS-system på Advanced Light Sources Beamline 8.0.1. Kredit:Marilyn Sargent/Berkeley Lab Fra næste generations smartphones til elbiler med længere rækkevidde og et forbedret elne -
 Robotstyret videospil får ældre voksne ud af komfortzonen, lære og arbejde sammenTo beboere i Elmcroft Senior Living sad side om side med front mod en stor skærm, løftede deres hænder i tandem, mens ur-lignende enheder på deres håndled styrede avatarerne foran dem. En gang imellem
Robotstyret videospil får ældre voksne ud af komfortzonen, lære og arbejde sammenTo beboere i Elmcroft Senior Living sad side om side med front mod en stor skærm, løftede deres hænder i tandem, mens ur-lignende enheder på deres håndled styrede avatarerne foran dem. En gang imellem
- Mekaniske egenskaber af nanomaterialer ændres på grund af elektrisk felt, finder forskere
- Kan størrelsesordenen 4 jordskælvsrater bruges til at forudsige store jordskælvsbegivenheder?
- Udforsk 200 års klimaforandringer i Danmark, Grønland, og Færøerne
- Fem elefanter dræbt med tog i Indien
- Israel søger at fodre den voksende globale appetit på madteknologi
- Farvel Cassini:Saturn -rumfartøjer gør ild, sidste dyk (opdatering)