


Slanger hjælper ingeniører med at designe søge- og redningsrobotter
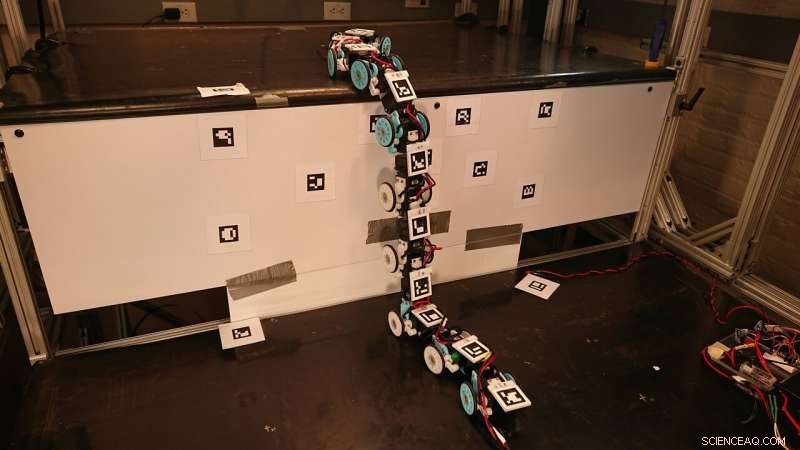
Johns Hopkins Universitys Terradynamics Lab skabte denne slangerobot for at efterligne dens dyremodstykke. Kredit:JHU/Will Kirk
Slanger lever i forskellige miljøer lige fra ulidelig varme ørkener til frodige tropiske skove, hvor de glider op ad træer, sten og buske hver dag. Ved at studere, hvordan disse slanger bevæger sig, Johns Hopkins ingeniører har skabt en slangerobot, der smidigt og stabilt kan klatre store trin.
Holdets nye resultater, udgivet i Journal of Experimental Biology og Royal Society Open Science , fremme skabelsen af søge- og redningsrobotter, der med succes kan navigere i forræderisk terræn.
"Vi ser til disse uhyggelige væsner for at få inspiration til bevægelser, fordi de allerede er så dygtige til stabilt at skalere forhindringer i deres daglige liv. Forhåbentlig kan vores robot lære at bobbe og væve på tværs af overflader ligesom slanger, " siger Chen Li, en assisterende professor i maskinteknik ved Johns Hopkins University og avisens seniorforfatter.
Tidligere undersøgelser havde hovedsageligt observeret slangebevægelser på flade overflader, men sjældent i 3-D terræn undtagen på træer, siger Li, og tag ikke højde for virkelige store forhindringer såsom murbrokker og affald, som søge- og redningsrobotter skulle klatre over.
Lis team studerede først, hvordan den variable kongeslange, en slange, der almindeligvis kan findes i både ørkener og fyrreskove, besteg trin i Li's Terradynamics Lab. Lis laboratorium forener robotteknologiens felter, biologi og fysik sammen for at studere dyrenes bevægelser for at få tips og tricks til at bygge mere alsidige robotter.
"Disse slanger skal regelmæssigt rejse hen over kampesten og væltede træer; de er mestre i bevægelse, og der er meget, vi kan lære af dem, " siger Li.
Li og hans team kørte en række eksperimenter, ændring af trinhøjden og trinenes overfladefriktion for at observere, hvordan slangerne fordrejede deres kroppe som reaktion på disse barrierer.
De fandt ud af, at slanger delte deres kroppe i tre sektioner:deres forreste og bageste krop vristede sig frem og tilbage på de vandrette trin som en bølge, mens deres midterste sektion forblev stiv, svæver bare så, at bygge bro over det store trin. De vridende portioner, de bemærkede, gav stabilitet for at forhindre slangen i at vælte.
Da slangerne kom tættere på og op på trappen, de tre kropssektioner rejste ned ad hvert kropssegment. Efterhånden som flere og flere af slangen nåede skridtet, dens forreste kropssektion ville blive længere, og dens bageste del ville blive kortere, mens den midterste kropssektion forblev nogenlunde den samme længde, ophængt lodret over de to trin.
Hvis trinene blev højere og mere glatte, slangerne ville bevæge sig langsommere og vride deres for- og bagkrop mindre for at bevare stabiliteten.
Efter at have analyseret deres videoer og bemærket, hvordan slanger klatrede op ad trin i laboratoriet, Qiyuan Fu, en kandidatstuderende i Lis laboratorium, skabt en robot til at efterligne dyrenes bevægelser.
I første omgang, robotslangen havde svært ved at holde sig stabil på store trin og slingrede og væltede ofte eller sad fast på trinene. For at løse disse problemer, forskerne indsatte et affjedringssystem (som det i din bil) i hvert kropssegment, så det kunne komprimeres mod overfladen, når det var nødvendigt. Efter dette, slangerobotten var mindre vaklende, mere stabil og klatrede trin så højt som 38 % af sin kropslængde med en næsten 100 % succesrate.
Sammenlignet med slangerobotter fra andre undersøgelser, Lis slangerobot var hurtigere og mere stabil end alle på nær én, og var endda tæt på at efterligne den faktiske slanges hastighed. En ulempe ved det tilføjede kropsophængssystem, imidlertid, brugte robotten mere strøm.
"Dyret er stadig langt mere overlegent, men disse resultater er lovende for robotter, der kan rejse på tværs af store forhindringer, " tilføjer Li.
Næste, holdet vil teste og forbedre slangerobotten til endnu mere komplekst 3D-terræn med mere ustrukturerede store forhindringer.
 Varme artikler
Varme artikler
-
 Konvoj, appen Uber for Trucking, scorer $ 400 millioner i ny finansieringsrundeKredit:CC0 Public Domain Konvoj, det Seattle-baserede selskab, hvis app lover at gøre fragtprocessen mere pålidelig og effektiv, sagde, at det har skaffet 400 millioner dollars i sin seneste finan
Konvoj, appen Uber for Trucking, scorer $ 400 millioner i ny finansieringsrundeKredit:CC0 Public Domain Konvoj, det Seattle-baserede selskab, hvis app lover at gøre fragtprocessen mere pålidelig og effektiv, sagde, at det har skaffet 400 millioner dollars i sin seneste finan -
 Afkodning af digitalt ejerskab:Hvorfor din e-bog måske ikke føles som dinKredit:CC0 Public Domain På trods af stereotyper, der maler millennials som al teknologi, hele tiden, unge mennesker kan stadig foretrække at krølle op med en papirbog frem for deres e-læser-endnu
Afkodning af digitalt ejerskab:Hvorfor din e-bog måske ikke føles som dinKredit:CC0 Public Domain På trods af stereotyper, der maler millennials som al teknologi, hele tiden, unge mennesker kan stadig foretrække at krølle op med en papirbog frem for deres e-læser-endnu -
 Internettilsynsmænd søger undertrykkelse af svindel med coronavirus-webstederInternettets online adresse manager ICANN opfordrer til en stærkere indsats for at stoppe spredningen af falske websteder, der bruger coronavirus-pandemien til at snyde forbrugere Agenturet, der
Internettilsynsmænd søger undertrykkelse af svindel med coronavirus-webstederInternettets online adresse manager ICANN opfordrer til en stærkere indsats for at stoppe spredningen af falske websteder, der bruger coronavirus-pandemien til at snyde forbrugere Agenturet, der -
 737 MAX-katastrofen skubber Boeing i krisetilstandBoeing blev kritiseret for at have undladt at reagere mere beslutsomt efter det andet dødbringende styrt på mindre end fem måneder med dets 737 MAX-fly Efter en anden luftkatastrofe, der involvere
737 MAX-katastrofen skubber Boeing i krisetilstandBoeing blev kritiseret for at have undladt at reagere mere beslutsomt efter det andet dødbringende styrt på mindre end fem måneder med dets 737 MAX-fly Efter en anden luftkatastrofe, der involvere
- Hvilken rolle har Catalase?
- Sådan beregnes succesrate
- Usikkerhed om fakta kan rapporteres uden at skade offentlighedens tillid til nyheder:undersøgelse
- Naturens funhouse-spejl:Forståelse af asymmetri i protonen
- Ny AI-tilgang slår bro over det slanke datagab, der kan forhindre dyb læringstilgange
- Tillid til andre forudsiger dødelighed i USA