


En menneskelignende planlægger, der tillader robotter at nå objekter i rodede miljøer
Figur, der beskriver, hvordan den menneskelignende planlægger fungerer. Kredit:Hasan et al.
Mens forskning inden for robotteknologi har ført til betydelige fremskridt i løbet af de sidste par år, der er stadig væsentlige forskelle i, hvordan mennesker og robotter håndterer objekter. Faktisk, selv de mest sofistikerede robotter, der hidtil er udviklet, kæmper for at matche de gennemsnitlige småbørns objektmanipulationsevner. Et særligt aspekt ved objektmanipulation, som de fleste robotter endnu ikke har mestret, er at nå og gribe efter bestemte objekter i et rodet miljø.
For at overvinde denne begrænsning, som en del af et EPSRC-finansieret projekt, forskere ved University of Leeds har for nylig udviklet en menneskelignende robotplanner, der kombinerer virtual reality (VR) og machine learning (ML) teknikker. Denne nye planlægger, introduceret i et papir, der er forudgivet på arXiv og skal præsenteres på den internationale konference om robotteknologi og automatisering (ICRA), kunne forbedre ydeevnen for en række robotter i objektmanipulationsopgaver.
"Vores forskningsmål er at udvikle bedre robotsystemer; systemer, der kan hjælpe mennesker med en række opgaver, lige fra at udforske farlige miljøer til at hjælpe et barn med at lære at skrive, "Prof. Anthony G. Cohn, hovedforsker for undersøgelsen, fortalte TechXplore. "Så vi dannede en tværfaglig gruppe af psykologer og dataloger for at undersøge, om vi kunne fange menneskers adfærd og ombygge de regler, som mennesker bruger, når de rækker efter objekter."
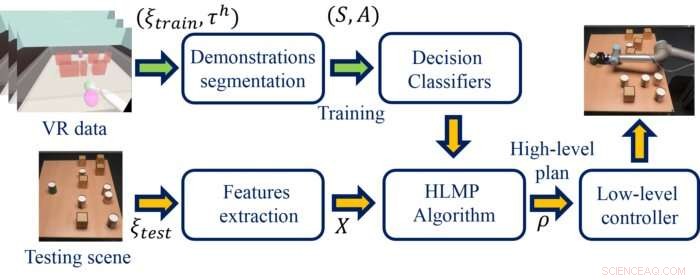
I modsætning til andre forskere, der uddannede maskinlæringsklassifikatorer i billeder af rodede miljøer, Cohn og hans kolleger ønskede at generere træningsdata ved hjælp af nye fordybende teknologier. I deres undersøgelse, de brugte således VR -udstyr til at indsamle data om mennesker, der udførte manipulationsopgaver.
Efterfølgende, de brugte ML-klassifikatorer til at analysere de VR-data, de indsamlede og udtrække generelle regler, der kan ligge til grund for menneskelig beslutningstagning. Planlæggeren bruger disse regler til at planlægge effektive strategier til robotter, der udfører objektmanipulationsopgaver.
"Vi ønskede, at de resulterende planer, som robotten udførte, også skulle være 'læselig for mennesker, "i den forstand, at det ville være dem, et menneske ville forvente, at et andet menneske ville henrette, hvilket ikke er tilfældet for mange nuværende robotplaner, "Forklarede Cohn.
Beslutninger fra mennesker, der udfører manipulationsopgaver, synes for det meste at være styret af kvalitative repræsentationer (dvs. ikke den nøjagtige afstand og retning for alle objekter i deres omgivende miljø, men snarere relative afstande og retninger). I deres undersøgelse, forskerne forsøgte bedre at forstå disse beslutningsprocesser for delvis at gengive dem i ML-klassifikatorer.
"Vi undersøgte, hvordan mennesker når i scenarier, hvor de objekter, de fatter, har særlige rumlige forhold og brugte metoder udviklet af AI -forskere ved University of Leeds til at beskrive kvalitativt, hvor objekterne var placeret, "Dr. Mohamed Hasan, en stipendiat, der arbejder på projektet, forklaret. "Dette betød, at planlæggeren kunne klassificere de kvalitative rumlige forhold mellem objekter og derefter vælge de handlinger, som mennesker ville bruge i dette scenario."
Den tilgang, som Cohn og hans kolleger foreslår, gør det muligt for robotter at identificere effektive handlinger, der kan nå et objekt i et rodet rum meget hurtigere, end de ville, hvis de skulle overveje alle mulige handlinger. Det gør det ved at lave en plan på højt plan, som er repræsenteret som en sekvens af vigtige waypoints og bevægelser. Denne plan overføres til en standardplanlægger på lavt niveau, som bruger den til at planlægge detaljerede baner for robotens arm.
"Vores planlægger fungerer på en måde, der ligner processen med at planlægge en rejse ved at vælge, hvilke byer der skal gennemgås, og først senere beslutte præcist, hvilke veje og baner der skal tages, "Cohn sagde." Vi fandt ud af, at denne tilgang gør vores menneskelignende planlægger meget mere effektiv end eksisterende planlæggere. "
Forskerne evaluerede deres planlægger i en række eksperimenter, teste det i VR-scenarier, hvor mennesker gennemførte manipulationsopgaver i fysikbaserede robotsimuleringer og brugte en ægte robotgreb. Alle tre evalueringer gav meget lovende resultater, med den menneskelignende planlægger, der overgår en topmoderne, standard baneoptimeringsalgoritme.
Planlæggeren, der blev udtænkt af Cohn og hans kolleger, var i stand til at generere effektive strategier, der tillod robotter at nå frem til objekter i rodede miljøer hurtigere og mere effektivt, end de ville, når de brugte standardbanetimeringsteknikkerne. Udover at introducere en lovende menneskelignende planlægger til robotmanipulationsopgaver, undersøgelsen viser, at VR-teknologi kan bruges til at studere menneskelig adfærd og få en bedre forståelse af beslutningsprocesser.
"Vores VR -platform, som blev udviklet internt ved University of Leeds, gjorde det muligt for os at registrere hundredvis af rækkevidde på en kort periode, men vi kunne også ændre miljøets layout mellem hvert forsøg og let præsentere præcis det samme miljø for forskellige menneskelige deltagere, "sagde prof. Mark Mon-Williams, medforsker og en kognitiv psykolog, forklaret. "Vores fund understøtter vores nylige forslag om, at VR vil blive et af de mest allestedsnærværende værktøjer inden for psykologisk forskning. Alligevel fandt vi også ud af, at regler, der ligger til grund for valg af menneskelig handling, kan fanges af ML -metoder."
I fremtiden, planlæggeren udviklet af Cohn og hans kolleger kunne bidrage til at forbedre manipulationsevnen hos både eksisterende og nye robotter, gør det muligt for maskiner at vælge handlinger mere effektivt og potentielt endda forklare "ræsonnementet" bag deres beslutninger. Denne nylige undersøgelse kan også tilskynde andre forskere til at bruge VR-data, når de undersøger menneskelige beslutningsprocesser, som så kunne gengives bedre i maskiner.
Forskningens endelige mål er at bygge intelligente robotter, der vil forstå og foregribe menneskelige hensigter i scenarier mellem mennesker og robotter. Ideelt set, sådanne robotter ville også kunne reagere på menneskelignende måder, kommunikere med menneskelige brugere på samme måde som et andet menneske ville.
"Det nuværende arbejde er et bevis på koncept, så vi planlægger nu at tage den metode, vi udviklede, og udnytte dens enorme potentiale, "Sagde Mon-Williams." Det er blevet klart, at denne kombination af datalogi og psykologi er en meget nyttig tilgang, der har potentiale til at kaste lys over valg af menneskelig handling, hvilket er vigtigt af flere årsager, herunder forståelse for, hvordan man behandler medicinske tilstande såsom slagtilfælde, samt hjælpe os med at designe mere effektive robotter. Vi arbejder i øjeblikket på vores næste række eksperimenter og projekter. "
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Omfattende rapport om private og offentlige Big Data-politikker, der påvirker transportKredit:metamorworks, Shutterstock Forskere har offentliggjort en omfattende rapport om private og offentlige Big Data-politikker, der påvirker transport i EU-lande og i udlandet. Efterhånden som
Omfattende rapport om private og offentlige Big Data-politikker, der påvirker transportKredit:metamorworks, Shutterstock Forskere har offentliggjort en omfattende rapport om private og offentlige Big Data-politikker, der påvirker transport i EU-lande og i udlandet. Efterhånden som -
 Bedre chokolade med mobilteknologiKredit:CC0 Public Domain Smart farming bruger teknologi til at få adgang til realtidsinformation om afgrødeudbytte og jordkortlægning, påføring af gødning, vejrdata, og intelligent vurdering og de
Bedre chokolade med mobilteknologiKredit:CC0 Public Domain Smart farming bruger teknologi til at få adgang til realtidsinformation om afgrødeudbytte og jordkortlægning, påføring af gødning, vejrdata, og intelligent vurdering og de -
 Temperatur helbreder lithiumdendritterBilledet viser den temperaturdrevne sammensmeltning og sammensmeltning af lithiumdendritter til en ensartet (glat) overflade, hvilket eliminerer risikoen for elektrisk kortslutning i lithium-ion-batte
Temperatur helbreder lithiumdendritterBilledet viser den temperaturdrevne sammensmeltning og sammensmeltning af lithiumdendritter til en ensartet (glat) overflade, hvilket eliminerer risikoen for elektrisk kortslutning i lithium-ion-batte -
 Digital autoritarisme i kinesisk stil vokser globalt:studieKinesiske embedsmænd har holdt sessioner om kontrol af information med 36 af de 65 lande vurderet af en menneskerettighedsundersøgelse Regeringer verden over optrapper brugen af onlineværktøjer,
Digital autoritarisme i kinesisk stil vokser globalt:studieKinesiske embedsmænd har holdt sessioner om kontrol af information med 36 af de 65 lande vurderet af en menneskerettighedsundersøgelse Regeringer verden over optrapper brugen af onlineværktøjer,
- Hvordan man laver saltkrystaller derhjemme
- Bæredygtighedskultur og genopbygning af konsensus om miljøpolitik
- Kortvarige virkninger af luftforurening
- Den antropocene epoke:mennesker mod jorden
- Elon Musks vision om en selvbærende by på Mars offentliggjort i New Space
- New Zealand er bedst placeret til at overleve kollaps