


GAMEOPT:En algoritme til at optimere strømmen af køretøjer gennem dynamiske ikke-signaliserede vejkryds
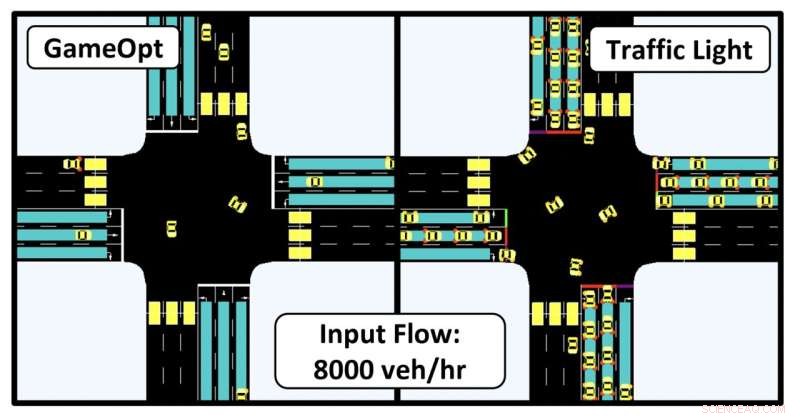
Billede, der viser, hvordan GAMEOPT fungerer sammenlignet med trafiklys. De lyseblå områder angiver kontrolzonen. Holdet viste, at ved identiske input-trafikflowniveauer overgår deres tilgang selv trafiklysinfrastruktur, hvilket resulterer i færre køer og muliggør en jævn trafikstrøm. Kredit:Suriyarachchi et al.
Håndtering af vejkryds i overfyldte og dynamiske miljøer, såsom byområder, kan være meget udfordrende. Den dårlige styring af trafikken ved disse kan føre til trafikulykker, spild af brændstof og miljøforurening.
Forskere ved University of Maryland har for nylig udviklet GAMEOPT, en ny algoritme, der kan hjælpe med at styre usignaliserede vejkryds med høj trafik mere effektivt. Forskerholdet med medlemmer, Nilesh Suriyarachchi, Rohan Chandra, John S. Baras og Dinesh Manocha introducerede deres metode i et nyligt papir, der skal offentliggøres i forbindelse med den 25. IEEE International Conference on Intelligent Transportation Systems (IEEE ITSC 2022). Denne metode kombinerer optimeringsteknikker med ideer fra spilteori, en matematisk konstruktion, der repræsenterer situationer, hvor forskellige agenter konkurrerer med hinanden.
"Fyrre procent af alle ulykker, 50% af alvorlige kollisioner og 20% af dødsfald sker i usignaliserede vejkryds," fortalte Chandra, et medlem af forskerholdet, til TechXplore. "Vores primære mål er at forbedre trafikflowet og brændstofeffektiviteten i dårligt regulerede eller uregulerede trafikkryds. For at nå dette mål foreslår vi en algoritme, der kombinerer ideer fra optimering og spilteori for at forstå, hvordan forskellige trafikagenter samarbejder og forhandler med hinanden kl. trafikkryds."
GAMEOPT, trafikflowstyringsalgoritmen udviklet af teamet, kan beregne optimale baner for individuelle agenter, der flyder gennem det samme vejkryds. For at gøre dette udfører den to forskellige trin.
I den første fase, (GAME), detekterer algoritmen tilstedeværelsen af alle køretøjer i et specifikt område af interesse (dvs. vejene, der fører op til krydset og selve krydset). Den kører derefter et auktionsprogram, der giver den mulighed for at bestemme, hvilke køretøjer der skal have prioritet ved at navigere i krydset, og skitserer den rækkefølge, i hvilken alle agenter i området af interesse vil flyde gennem krydset.
"Vores auktionsmodul bruger chaufførernes adfærd og incitamenter til at bestemme denne rækkefølge," sagde Chandra. "I modsætning til eksisterende tilgange til styring af vejkryds, såsom brug af lyskryds og stopskilte, bruger vores nye rammer spilteori til at skabe retfærdige og effektive prioriteringsrækkefølger for vejkryds."
I det andet trin, (OPT), bruger algoritmen blandet heltals kvadratisk programmering til at beregne de optimale baner, der opfylder prioritetsrækkefølgen beregnet i trin 1 (sammen med at opfylde andre begrænsninger såsom sikkerhed, gennemførlighed osv.). "De optimale baner produceret af vores algoritme opfylder prioritetsrækkefølgen og giver samtidig effektivitet, retfærdighed og sikkerhedsgarantier," sagde Suriyarachchi. "GAMEOPT opererer også ved beregningshastigheder på mindre end 10 millisekunder i trafik med høj tæthed på mere end 10.000 køretøjer/time, hvilket gør det i realtid selv i tæt trafik scenarier. Det er yderst effektivt, og vi fandt ud af, at det overgår state-of - de nyeste metoder til at reducere trængsel, tid til mål og brændstofforbrug i en realistisk trafiksimulator."
I forskellige trafiksimuleringer udført af forskerne opnåede GAMEOPT meget lovende resultater. Det kunne reducere trængsel og brændstofemissioner betydeligt, håndtere varierende trafiktætheder ved forskellige dele af kryds og tillade flere køretøjer at køre ind i krydset samtidigt.
"I simuleringer forbedrer vores algoritme gennemløbet med mindst 25%, tiden det tager at nå målet med 75% og brændstofforbruget med 33% sammenlignet med standardpraksis for brug af trafiklys og stopskilte," sagde Manocha. "GAMEOPTs realtidsdriftskapacitet er 100 gange hurtigere end andre fuldt optimeringsbaserede metoder, samtidig med at den giver garantier med hensyn til retfærdighed, sikkerhed og effektivitet."
I fremtiden kan GAMEOPT vise sig at være et yderst værdifuldt værktøj til at styre vejkryds i belastede bymiljøer mere effektivt. Derudover kan det bidrage til drastisk at reducere brændstofforbruget og kulstofemissionerne og dermed spare energi og reducere skaderne på planeten.
Holdet planlægger at fortsætte med at arbejde på deres algoritme og perfektionere den. I deres næste værker planlægger de at teste dens ydeevne i mere komplekse simulerede byscenarier og udvikle en prototype, der kan implementeres i virkelige omgivelser. Mens den nuværende iteration af algoritmen henvender sig til forbundne autonome køretøjer, er en udvidelse til at overveje menneskedrevne køretøjer ved at blive udviklet.
"Vi vil også gerne udnytte kraften i kunstig intelligens og maskinlæring til at estimere chaufførernes incitamenter og prioriteter til at beregne en mere realistisk prioriteringsrækkefølge og derved yderligere forbedre trafikstrømmen," tilføjede Manocha.
"Derudover kunne vi teste algoritmen med specielle agenter, såsom udrykningskøretøjer, der har højere eller anderledes prioriteter." + Udforsk yderligere
Kunstig intelligens til at hjælpe autonome køretøjer med at undgå tomgang ved rødt lys
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Den globale økonomi vakler, da verden går i stå midt i en epidemiØde gader i Wuhan, Kina afspejler en økonomi i stilstand Verden går i stå, efterhånden som den nye coronavirus spreder sig:skoler er lukket i Japan, stævner er forbudt i Schweiz, og flyvninger er
Den globale økonomi vakler, da verden går i stå midt i en epidemiØde gader i Wuhan, Kina afspejler en økonomi i stilstand Verden går i stå, efterhånden som den nye coronavirus spreder sig:skoler er lukket i Japan, stævner er forbudt i Schweiz, og flyvninger er -
 Broadcom fremskynder flytningen af hovedkvarteret til USA midt i en sikkerhedsgennemgangDen amerikanske producent af halvleder- og telekommunikationsudstyr Qualcomm er målet for et overtagelsestilbud fra Singapore-baserede Broadcom Den Singapore-baserede chipproducent Broadcom sagde
Broadcom fremskynder flytningen af hovedkvarteret til USA midt i en sikkerhedsgennemgangDen amerikanske producent af halvleder- og telekommunikationsudstyr Qualcomm er målet for et overtagelsestilbud fra Singapore-baserede Broadcom Den Singapore-baserede chipproducent Broadcom sagde -
 Feds:Lastbilchauffør forårsagede sandsynligvis selvkørende shuttlestyrtDenne 8. nov. 2017, filfoto af KVVU-reporter Kathleen Jacob viser en førerløs shuttlebus, efter at den kolliderede med en stor rig i Las Vegas. Føderale efterforskere siger, at en kollision mellem en
Feds:Lastbilchauffør forårsagede sandsynligvis selvkørende shuttlestyrtDenne 8. nov. 2017, filfoto af KVVU-reporter Kathleen Jacob viser en førerløs shuttlebus, efter at den kolliderede med en stor rig i Las Vegas. Føderale efterforskere siger, at en kollision mellem en -
 NTSB ønsker, at alle nye køretøjer kontrollerer chauffører for alkoholbrugEn række af kors danner et mindesmærke langs Highway 33, da politibetjente undersøger stedet en dag efter et styrt dræbte ni mennesker syd for Coalinga, Californien, lørdag den 2. januar 2021. Efterfo
NTSB ønsker, at alle nye køretøjer kontrollerer chauffører for alkoholbrugEn række af kors danner et mindesmærke langs Highway 33, da politibetjente undersøger stedet en dag efter et styrt dræbte ni mennesker syd for Coalinga, Californien, lørdag den 2. januar 2021. Efterfo
- Hvordan laver man en elektrisk ledende Liquid
- Undersøgelse viser potentiale for reduceret metan fra køer
- Nye observationer hjælper med at forklare tabbys Stars dæmpning
- Ekstreme højfrekvente signaler muliggør datalinks i terabit pr. sekund
- Fysikere kaster lys over en anden form for kaos
- Falske nyheder, aftagende medietillid og sociale mediers rolle