


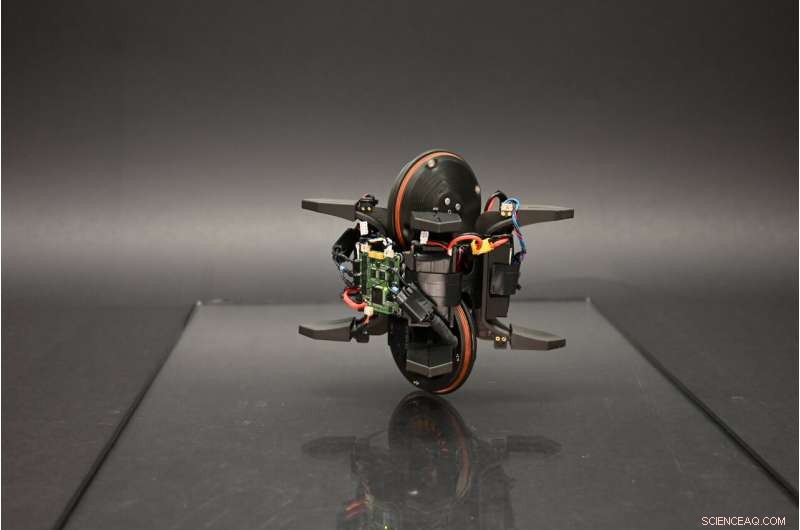
The Wheelbot:En symmetrisk ethjulet cykel med springreaktionshjul

Kredit:Geist et al.
Forskere ved RWTH Aachen University i teamet af Prof. Sebastian Trimpe og Max Planck Instituttet for Intelligente Systemer (MPI-IS) Stuttgart har for nylig udviklet Wheelbot en symmetrisk reaktionshjul-enhjulet cykel, der autonomt kan hoppe op på hjulene fra enhver startposition. Denne unikke robot, introduceret i et papir offentliggjort i IEEE Robotics and Automation Letters blev fremstillet ved hjælp af en kombination af hylde- og 3D-printede komponenter.
"Vores forskningsgruppe arbejder i krydsfeltet mellem datavidenskab og ingeniørvidenskab. En bestemt retning af vores forskning fokuserer på at kombinere indsigt fra kontrolteori med maskinlæring," fortalte René Geist, medlem af Trimpes team i Aachen og ledende forsker bag Wheelbot, til Tech. Xplore. "Testbeds såsom penduler, robotarme og quadcoptere hjælper os med at kontrollere, om de teoretiske antagelser, der ligger til grund for en algoritme, er praktiske i virkeligheden. Ideelt set er disse testbeds enkle at bruge, mens de er udfordrende at kontrollere med avancerede algoritmer. , hvilket tvinger os til at tænke ud af boksen."
To andre eksempler på sådanne testsenge er den såkaldte "Balancing Cube" og dens efterkommer "Cubli". Disse to systemer har ofte hjulpet med at evaluere effektiviteten af netværkskontrolsystemer og datadrevne metoder til at opnå ikke-lineær kontrol.
Det seneste arbejde af Trimpe, Geist og deres kolleger bygger på disse tidligere indsatser på området. Deres mål var at udvikle en minimalistisk ethjulsrobot, der kunne bruges som testbed af robotister og dataloger verden over. For at gøre dette gik Trimpe og hans forskningsgruppe ved RWTH Aachen University sammen med Jonathan Fiene, leder af ZWE Robotics-laboratoriet ved MPI-IS.
"Tidligt i projektet valgte vi at bruge børsteløse motorer, da ZWE-robotikken har masser af erfaring med at bruge disse i det åbne dynamiske robot-initiativ, mens priserne på lette børsteløse motorer faldt på grund af den udbredte tilpasning af quadcoptere hos forbrugeren marked," forklarede Geist. "Når man ser på en motor, er den nok enkleste aktuator, man kan finde på, at fastgøre et hjul til den. Hvis et sådant hjul rører jorden, kalder vi det et 'rullende hjul', hvis det ikke gør det, henviser vi til det som et 'reaktionshjul'."
At balancere en enkeltkrops, ikke-flyvende robot med evnen til at køre og udføre manøvrer kræver generelt minimum to hjul. Disse kan enten være rullende hjul, hvilket resulterer i en Segway-lignende robot eller et enkelt rullende hjul og et reaktionshjul, hvilket resulterer i, hvad der er kendt som et "reaktionshjul" - eller "øjebliksudveksling" - encykelrobot.
Enhjulede robotter, der integrerer reaktionshjul, har meget enkle design og kan nemt samles af både ekspert robotister og studerende. På trods af deres enkelhed er enhjulede cykler ret svære at kontrollere. Dette gør dem til særligt gunstige testbeds for forskning i robotnetværk og læringsbaserede styringsmetoder.
"Tidligere foreslåede ethjulede robotter er designet til udelukkende at balancere tæt omkring deres opretstående ligevægtsposition, hvilket i høj grad begrænser, hvad du kan gøre med disse systemer," sagde Geist. "For at maksimere anvendeligheden af en reaktionshjulet encykelrobot, besluttede vi, at Wheelbot'en skal være i stand til at komme sig efter ret store forstyrrelser, have en indbygget strømforsyning for at forhindre, at kabler begrænser dens manøvredygtighed, og derudover skal være i stand til at rejse sig selv efter vælte."
Ligesom hjulene på ethjulede cykler har Wheelbot et rullende hjul, der forhindrer den i at vælte, mens den bevæger sig i længderetningen. I modsætning til ethjulede cykler integrerer robotten dog også et reaktionshjul, der forhindrer den i at vælte i sideretningen.
"For at forstå den indre funktion af et reaktionshjul kan du lave et simpelt eksperiment derhjemme," sagde Geist. "Alt du skal bruge er en drejestol og en moderat tung genstand, såsom en kat. Sid med knæene på stolen og ret armene, mens du holder katten, og drej derefter din overkrop med uret. Mens katten bukker under for sin skæbne, du vil bemærke, at dine knæ roterer mod uret. I denne analogi betegner din overkrop motorens rotor, mens din underkrop betegner motorens stator."
I det væsentlige, i reaktionshjul, når en motors rotor (fastgjort til hjulet) roterer med uret, vil motorens stator (fastgjort til resten af Wheelbot) rotere mod uret. Robotter, der balancerer ved hjælp af et reaktionshjul, adskiller sig fra robotter, der tyer til gyroskoper til balancering. I et gyroskop roteres et hurtigt roterende hjul ortogonalt i forhold til dets rotationsretning, hvilket skaber balancerende drejningsmomenter på grund af en bevarelse af vinkelmomentum.
I et reaktionshjul forekommer disse effekter også, men de er minimale i forhold til reaktionsmomenterne. Reaktionsmomenter skabes direkte inde i hjulet og peger parallelt med hjulets omdrejningsretning.
Kredit:Geist et al.
"Under selvrejsning skal reaktionsmomenter dreje Wheelbot'en 90 grader," forklarede Geist. "Under manøvren trækker Wheelbot'ens motor 16 Ampere ved 24 Volt. For en 22 cm (8,7 tommer) stor robot fylder motorerne faktisk en del, hvilket tvinger os til at bruge en specialdesignet motorcontroller, som kommercielt tilgængelige motorcontrollere var enten for stor eller kunne ikke håndtere nok strøm ved den givne spænding."
Ved et strømforbrug på 16 Ampere fandt forskerne ud af, at motoren, der bevægede Wheelbot, nåede sin hastighedsgrænse på kun 0,25 sekunder. På grund af denne begrænsning og andre udfordringer, man typisk støder på, når man bygger reaktionshjulbaserede ethjulede cykler, besluttede Geist og hans kolleger at udtænke et helt nyt design til deres robot.
"Først besluttede vi, at robotten skulle være symmetrisk, hvilket effektivt reducerer antallet af forskellige dele, man skal udskrive, og giver Wheelbot'en mulighed for at bruge et hvilket som helst af dets hjul som rullende hjul," sagde Geist. "Symmetri har den yderligere fordel, at det øverste hjul skal være betydeligt mindre sammenlignet med eksisterende ethjulede robotter, hvilket reducerer dens rotationsinerti i krøjningsretningen. For det andet har vi designet robottens dimensioner for at minimere det nødvendige drejningsmoment til selvrejsning."
I indledende test fandt forskerne ud af, at standardversionen af deres robot kunne hoppe op på hjulene fra enhver startposition i to trin. Dette gør det muligt for robotten at bremse sit reaktionshjul, før den afslutter det andet og sidste trin (dvs. skubber sig selv op igen). '
Udover at lave en prototype af deres robot, skabte Geist og hans kolleger også en tilpasset tilstandsestimator, en algoritme, der kan estimere robottens rulle- og pitch-vinkler. Dette system udleder sine estimeringer fra målinger af robottens fire inertiale måleenheder (IMU'er) og hjulenkodere, som kun er baseret på forudgående og tilgængelig viden om robottens såkaldte kinematiske model (dvs. en matematisk beskrivelse af positionen af robottens position). massemidtpunkt).
"Vi mener, at i tilfælde af hjulrobotter (inklusive Ballbots), danner den foreslåede estimator et interessant alternativ til andre estimeringsalgoritmer såsom Kalman-filtrering," sagde Geist. "Wheelbot demonstrerer, at et kortfattet valg af en reaktionshjul enhjulsrobots dimensioner og hardware giver en alsidig testbed for robotstyring."

Kredit:Geist et al.
Geist og hans kolleger var de første til at skabe en enhjulet robot, der effektivt kan hoppe på hjulene fra enhver startposition. Deres papir er således et vigtigt bidrag til robotteknologien, da det løser de elektroniske og mekaniske udfordringer, man typisk støder på, når man skaber denne nye type reaktionshjulbaserede ethjulede cykler.
"Udover at være et udfordrende testbed for robotstyring, ser vi et stort potentiale for Wheelbot som en uddannelsesplatform, der introducerer studerende til robotteknologi," sagde Geist. "I denne henseende er Wheelbot et typisk eksempel på at demonstrere robotteknologiens tværfaglige natur. Udover dets mekaniske design, der kræver modellering og simulering af robottens ganske interessante dynamik, udgør højstrømstrækket af dens motorer betydelige udfordringer for dets elektronikdesign."
I fremtiden kan Wheelbot bruges i både uddannelses- og forskningsmiljøer til at teste robotstyringsnetværk, maskinlæringsalgoritmer og andre modeller. En vigtig fordel ved robotten er, at dens drift kun kræver en grundlæggende viden om softwareteknik, hvilket gør den til en ideel eksperimentel platform for studerende og ingeniører, der tager deres første skridt inden for robotteknologi.
Forskere i Trimpes team arbejder nu på en ny version af deres robot, kaldet Wheelbot v3. Et kernemål er at gøre robotten endnu mere tilgængelig, så den er lettere at bygge, bruge og eksperimentere med.
"Den næste version af Wheelbot vil være en smule mindre end den nuværende version, bruger en mere kraftfuld mikrocontroller, og dens firmwaredesign er lettere at betjene," tilføjede Geist. "Derudover arbejder vi i øjeblikket på en kontrolalgoritme, der styrer Wheelbot'en langs en foruddefineret sti. Efter at have bygget den første hoppereaktionshjul-enhjulede robot, er vi glade for at kunne demonstrere, at Wheelbot'en også er i stand til at udføre agile køremanøvrer." + Udforsk yderligere
En bil med hjul, firbenet og humanoid robot:Swiss-Mile Robot fra ETH Zürich
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 En robot med et fast, men blidt grebEn robotgreb udviklet i laboratoriet ved University of Buffalo -ingeniøren Ehsan Esfahani bruger frastødning mellem magneter til at justere stivheden i dens greb, forbedring af sikkerheden. Kredit:Dou
En robot med et fast, men blidt grebEn robotgreb udviklet i laboratoriet ved University of Buffalo -ingeniøren Ehsan Esfahani bruger frastødning mellem magneter til at justere stivheden i dens greb, forbedring af sikkerheden. Kredit:Dou -
 Ransomware-helten Hutchins løsladt efter at have erklæret sig skyldigMarcus Hutchins (R), set forud for en retsoptræden i 2017, blev hyldet som en helt for at dæmme op for WannaCry ransomware-udbruddet, men senere sigtet i USA for at skabe malware, der kunne angribe ba
Ransomware-helten Hutchins løsladt efter at have erklæret sig skyldigMarcus Hutchins (R), set forud for en retsoptræden i 2017, blev hyldet som en helt for at dæmme op for WannaCry ransomware-udbruddet, men senere sigtet i USA for at skabe malware, der kunne angribe ba -
 Nanopartikel svævet af lys roterer med 300 milliarder omdr./minForskere ved Purdue University har skabt verdens hurtigste roterende menneskeskabte objekt og den mest følsomme momentdetektor ved at suspendere en nanopartikel i et vakuum med en laser, og derefter b
Nanopartikel svævet af lys roterer med 300 milliarder omdr./minForskere ved Purdue University har skabt verdens hurtigste roterende menneskeskabte objekt og den mest følsomme momentdetektor ved at suspendere en nanopartikel i et vakuum med en laser, og derefter b -
 Ny mobilapp til sundere madvalg, når du spiser udeKredit:Heather Hartwell I løbet af de sidste par år, hyppigheden af at spise på restauranter eller andre spisesteder uden for hjemmet i Europa er steget radikalt. Endnu, sammenlignet med måltide
Ny mobilapp til sundere madvalg, når du spiser udeKredit:Heather Hartwell I løbet af de sidste par år, hyppigheden af at spise på restauranter eller andre spisesteder uden for hjemmet i Europa er steget radikalt. Endnu, sammenlignet med måltide
- Foldet papir skaber et bærbart laboratorium til feltlaboratorietests
- Slam:Hvordan virksomheder tvinger os til at bruge mere
- NASAs Hubble finder stjerner i spiralform, hvilket giver vindue til det tidlige univers
- Upcycling lover at gøre madspild til dit næste måltid
- Hvordan tegner Electron Dot Diagrams
- Svampebaseret madprodukt, der smager og strimles som kød