


Et intelligent blødt materiale, der krøller under tryk eller udvider sig, når det strækkes
Et intelligent blødt materiale kan krølle under tryk eller mekanisk belastning. Kredit:American Chemical Society
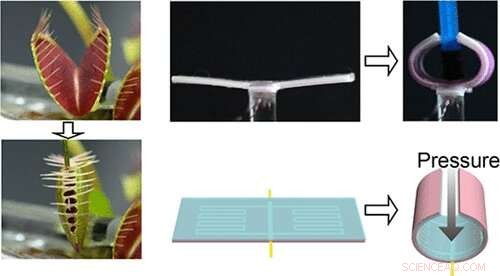
Planter og dyr kan hurtigt reagere på ændringer i deres miljø, såsom en Venus flyvefælde, der knækker, når en flue rører ved den. Imidlertid, replikering af lignende handlinger i bløde robotter kræver kompleks mekanik og sensorer. Nu, forskere, der rapporterer i ACS anvendte materialer og grænseflader have trykt flydende metalkredsløb på et enkelt stykke blød polymer, skabe et intelligent materiale, der krøller under tryk eller mekanisk belastning.
Ideelt set bløde robotter kunne efterligne intelligent og autonom adfærd i naturen, kombinerer sansning og kontrolleret bevægelse. Men integrationen af sensorer og de bevægelige dele, der reagerer, kan være klodset eller kræve en ekstern computer. Der er behov for et enkelt-enhedsdesign, der reagerer på miljøstimuli, såsom mekanisk tryk eller strækning. Flydende metaller kunne være løsningen, og nogle forskere har allerede undersøgt deres anvendelse i bløde robotter. Disse materialer kan bruges til at skabe tynde, fleksible kredsløb i bløde materialer, og kredsløbene kan hurtigt producere varme, når der genereres en elektrisk strøm, enten fra en elektrisk kilde eller fra tryk påført kredsløbet. Når de bløde kredsløb strækkes, strømmen falder, afkøling af materialet. At lave en blød robot, der er i stand til at være autonom, intelligent bevægelse, Chao Zhao, Hong Liu og kolleger ønskede at integrere flydende metalkredsløb med flydende krystalelastomerer (LCE) - polymerer, der kan undergå store ændringer i deres form, når de opvarmes eller afkøles.
Forskerne anvendte en nikkel-infunderet gallium-indium-legering på en LCE og flyttede magnetisk det flydende metal ind i linjer for at danne et uafbrudt kredsløb. En silikoneforsegling, der skiftede fra pink til mørkerød, når den blev opvarmet, holdt kredsløbet beskyttet og på plads. Som svar på en strøm, det bløde materiale krøllede sig, da temperaturen steg, og filmen blev rødere med tiden. Teamet brugte materialet til at udvikle autonome gribere, der opfattede og reagerede på tryk eller strækninger, der blev påført kredsløbene. Griberne kunne samle små runde genstande op og så tabe dem, når trykket blev udløst eller materialet blev strakt. Endelig, forskerne formede filmen til en spiralform. Når der blev påført tryk på kredsløbet i bunden af spiralen, det udfoldede sig med en roterende bevægelse, da spiralens temperatur steg.
Forskerne siger, at disse tryk- og strækfølsomme materialer kunne tilpasses til brug i bløde robotter, der udfører komplekse opgaver eller bevægelse.
 Varme artikler
Varme artikler
-
 Forskere identificerer en ny måde, hvorpå tarmbakterier nedbryder komplekse sukkerarterKredit:CC0 Public Domain Nyt lys er blevet kastet over menneskelige tarmbakteriers funktion, som kan hjælpe med at udvikle medicin i fremtiden for at forbedre sundhed og velvære. Forskere har fun
Forskere identificerer en ny måde, hvorpå tarmbakterier nedbryder komplekse sukkerarterKredit:CC0 Public Domain Nyt lys er blevet kastet over menneskelige tarmbakteriers funktion, som kan hjælpe med at udvikle medicin i fremtiden for at forbedre sundhed og velvære. Forskere har fun -
 Ny beregningsmetode til lægemiddelopdagelseForsidebilledet illustrerer TauRAMD-metoden, som er baseret på Random Acceleration Molecular Dynamics-teknikken og designet til beregning af de relative opholdstider, tau, af lægemiddellignende forbin
Ny beregningsmetode til lægemiddelopdagelseForsidebilledet illustrerer TauRAMD-metoden, som er baseret på Random Acceleration Molecular Dynamics-teknikken og designet til beregning af de relative opholdstider, tau, af lægemiddellignende forbin -
 Glycerol Vs. MineralolieVed første inspektion ser glycerol og mineralolie ud til at være identiske (eller i det mindste meget ens) forbindelser: De er begge farveløse, (for det meste) lugtløse, og har milde smøreegenskaber,
Glycerol Vs. MineralolieVed første inspektion ser glycerol og mineralolie ud til at være identiske (eller i det mindste meget ens) forbindelser: De er begge farveløse, (for det meste) lugtløse, og har milde smøreegenskaber, -
 Accelererende opdagelse af elektrokatalysatorer med maskinlæringForskere baner vejen for total afhængighed af vedvarende energi, da de studerer både store og små måder at erstatte fossile brændstoffer på. En lovende vej er at omdanne simple kemikalier til værdiful
Accelererende opdagelse af elektrokatalysatorer med maskinlæringForskere baner vejen for total afhængighed af vedvarende energi, da de studerer både store og små måder at erstatte fossile brændstoffer på. En lovende vej er at omdanne simple kemikalier til værdiful
- Vulkansk grus, vandmangel truer La Palmas -bananer
- Hvad er resultatet af at tilføje blynitrat til kaliumiodid?
- Vandkraft, innovationer og undgå international dæmonskam
- Ændring af husdyr i det gamle Europa afspejler politiske skift
- De bedste måder at dyrke bakterier på Agar
- Brud på Wiedemann-Franz-loven