


Første søforsøg med en revolutionerende ny undersøisk robot
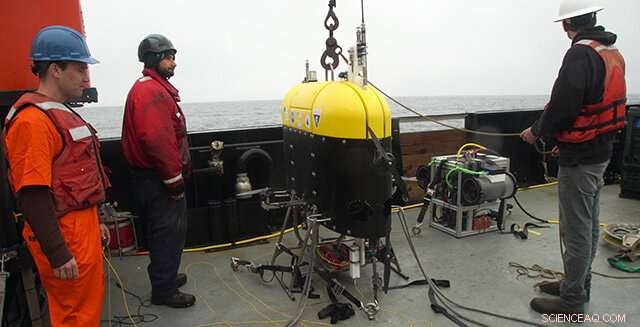
Ingeniører fra Woods Hole Oceanographic Institution og skibets besætning på R/V Rachel Carson forbereder sig på at lancere Mesobot i Monterey Bay. MBARIs "SmartClump" er i baggrunden, afventer indsættelse. Kredit:Erik Olsen/WHOI
I slutningen af juni sluttede forskere fra MBARI sig til ingeniører fra Woods Hole Oceanographic Institution (WHOI) for at teste en ny race af undersøiske robotter designet til at åbne nye veje for forskning i mesopelagiske, også kendt som havets skumringszone. Dette køretøj, Mesoboten, stammer fra WHOI og blev udviklet i løbet af de sidste to år med kritisk input fra forskere og ingeniører på MBARI, Stanford University, og University of Texas Rio Grande Valley. Mesobot er specielt designet til at spore og studere svømning og drivende dyr så meget som 1, 000 meter (3, 300 fod) under overfladen i op til 24 timer i træk.
Mesobot vil udvide og forstærke tidligere midtvandsarbejde fra MBARI og andre institutioner. I årtier, MBARI -forskere ledet af Bruce Robison og Steve Haddock og andre har brugt fjernbetjente køretøjer (ROV'er) til at studere sådanne midvandsdyr. Selvom det sjældent ses, disse skabninger hjælper med at understøtte større fiskeri såsom tun og sværdfisk, levere mad til andre store dyr som hajer og hvaler, og hjælpe med at regulere Jordens klima ved at flytte kulstof fra overfladen til dybt vand.
Projektet finansieres af National Science Foundation, WHOI, MBARI, og Audacious Project, der ligger i TED.
Multiinstitutionsteamet designet Mesobot til at være mindre forstyrrende for dybhavsdyr end de fleste ROV'er, udstyret det med svagt lys 4K-kameraer, røde lys, der er mindre synlige for dyr i mesopelagic, og store, langsomt drejelige propeller, der minimerer forstyrrelser i vandet. Banebrydende computersoftware tillader også køretøjet at spore dyr eller objekter under vandet i op til 24 timer ad gangen, når de bevæger sig gennem deres daglige lodrette vandring.

Dette foto viser Mesoboten, der sporer et simuleret havdyr (hvidt objekt på snor) i MBARIs testtank. Kredit:WHOI/ Erik Olsen
Mesobot er en hybrid mellem en ROV, som drives og styres ved hjælp af en tøj, der er fastgjort til et overfladeskib, og et autonomt undervandskøretøj (AUV), som er programmeret på overfladen og fungerer uden menneskelig indgriben under vandet.
I begyndelsen af hvert dyk, operatører styrer Mesobot fra overfladen som en ROV, ved hjælp af en tynd fiberoptisk tøj. Forskerne frigiver derefter bindingen og spoler den tilbage på skibet, mens robotten fortsætter alene som en AUV.
MBARI -personale har været involveret i flere aspekter af projektet. Overingeniør Kakani Katija, Seniorforsker Bruce Robison, og mekanisk ingeniør Brett Hobson var involveret i køretøjets konceptuelle design. Køretøjets vigtigste computersystem er baseret på et design, der er udviklet til MBARI's langtrækkende AUV. Dyresporingssystemet er designet af softwareingeniør Mike Risi, sammen med Katija og MBARI Adjunct og Stanford University Professor Steve Rock, baseret på et system, der allerede er testet på flere MBARI ROV'er.
Under det seneste feltprogram, holdets ingeniører samlede Mesobot og testede den i MBARIs store indendørs saltvandstank. Efter at have bekræftet, at køretøjet fungerede korrekt, de tog det til søs på MBARIs forskningsfartøj Rachel Carson i tre dage med åbne vandtest i Monterey Bay.

Lancering af Mesobot fra dækket af MBARIs forskningsfartøj Rachel Carson. Kredit:WHOI/ Erik Olsen
Under felttestene Mesoboten lavede fem dyk, hver flere hundrede meter under overfladen. Disse tests hjalp designerne med at teste køretøjssystemer under virkelige forhold og forfine deres metoder til at lancere køretøjet fra siden af et rullende skib. Håndtering af tyndbindingen præsenterede en bestemt, men forventet, udfordring. "Pakken med videnskabelig instrumentering ombord på Rachel Carson og ekspertskibshåndtering og dækarbejde var afgørende for vores succes, "sagde Mesobot -designer og hovedingeniør Dana Yoerger.
For at hjælpe med at holde øje med køretøjet og dets fastspænding, holdet brugte MBARIs "SmartClump, "et vægtet bundt af sensorer og kameraer, der er knyttet til en tøjring. Dette giver piloter og forskere et overheadperspektiv, der gør undervandsoperationer sikrere og mere effektive.
Til sidst håber forskerne at bruge Mesobot til at udføre daglige undersøgelser af individuelle dyr eller grupper af dyr, når de deltager i "daglig lodret migration" - den største dyremigration på Jorden. Mange havdyr (herunder sart, blødgyldige geléer) vandrer hundredvis af meter mod havoverfladen ved tusmørke og går derefter ned i dybet ved daggry. Dette fænomen er stadig dårligt forstået. Forskerne håber, at Mesobot vil være i stand til at følge individuelle dyr under deres migration for at lære mere om, hvordan og hvorfor de gennemgår denne anstrengende daglige rejse.
 Varme artikler
Varme artikler
-
 Sådan fungerer Iowa -lagrede energiparkenIowa Stored Energy Park, målrettet færdig i 2011, vil koste omkring $ 200, 000 til 225 $, 000 - eksklusive omkostninger ved vindmøller. Se billeder af vindenergi. 2008 HowStuffWorks Som energikilde,
Sådan fungerer Iowa -lagrede energiparkenIowa Stored Energy Park, målrettet færdig i 2011, vil koste omkring $ 200, 000 til 225 $, 000 - eksklusive omkostninger ved vindmøller. Se billeder af vindenergi. 2008 HowStuffWorks Som energikilde, -
 Beijing fryser, da temperaturen når det laveste i fem årtierTemperaturerne i Beijing faldt til det laveste niveau siden 1966 i denne uge Temperaturerne i den kinesiske hovedstad faldt til det laveste i mere end fem årtier torsdag. da Beijing blev ramt af s
Beijing fryser, da temperaturen når det laveste i fem årtierTemperaturerne i Beijing faldt til det laveste niveau siden 1966 i denne uge Temperaturerne i den kinesiske hovedstad faldt til det laveste i mere end fem årtier torsdag. da Beijing blev ramt af s -
 Alaska tordenvejr kan tredobles med klimaændringerKredit:CC0 Public Domain Opvarmende temperaturer vil potentielt ændre klimaet i Alaska så dybt senere i dette århundrede, at antallet af tordenvejr vil tredobles, øger risikoen for omfattende over
Alaska tordenvejr kan tredobles med klimaændringerKredit:CC0 Public Domain Opvarmende temperaturer vil potentielt ændre klimaet i Alaska så dybt senere i dette århundrede, at antallet af tordenvejr vil tredobles, øger risikoen for omfattende over -
 Hedebølge rammer nordvest, at sende folk til kølecentreEn frivillig hjælper med at oprette snacks på et kølecenter, der er etableret for at hjælpe udsatte beboere med at køre ud af den anden farlige hedebølge, der griber fat i Stillehavets nordvest i somm
Hedebølge rammer nordvest, at sende folk til kølecentreEn frivillig hjælper med at oprette snacks på et kølecenter, der er etableret for at hjælpe udsatte beboere med at køre ud af den anden farlige hedebølge, der griber fat i Stillehavets nordvest i somm
- Forskellen mellem metaconglomerat og Conglomerate
- Formler til bestemmelse af specifik gravitet
- Forskning tyder på, at SEC'ers øgede fokus på terrorisme kan begrænse finansielt tilsyn
- Tid, forældre bruger sammen med børn, er nøglen til akademisk succes
- Hvad er fluorescerende lysets spektrum?
- Dinosaurs fodspor viser rovdyr så store som T. rex, der trampede tværs gennem Australien for 160 m…