


Næste generations robotkakerlak kan udforske miljøer under vand
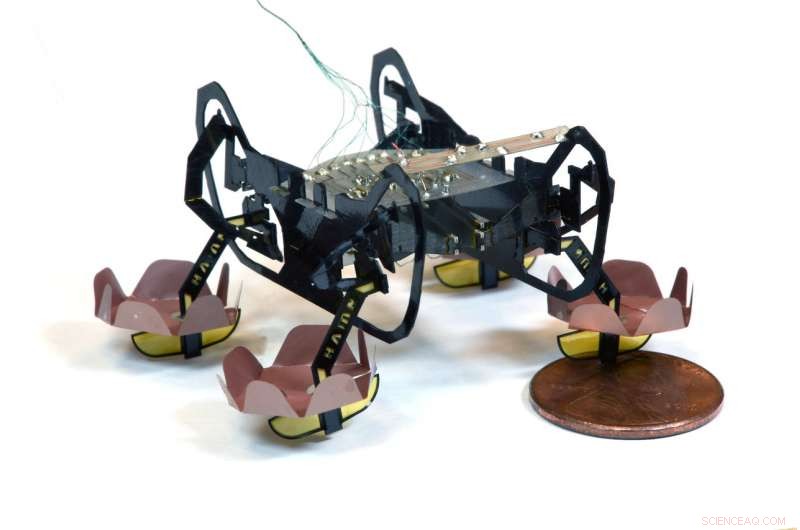
Den næste generation af Harvard's Ambulatory Microrobot (HAMR) kan gå på land, svømme på overfladen af vand, og gå under vandet, åbne nye miljøer for denne lille bot at udforske. Kredit:Yufeng Chen, Neel Doshi, og Benjamin Goldberg/Harvard University
I naturen, kakerlakker kan overleve under vandet i op til 30 minutter. Nu, en robotkakerlak kan gøre det endnu bedre. Harvards ambulerende mikrorobot, kendt som HAMR, kan gå på land, svømme på overfladen af vand, og gå under vandet så længe som nødvendigt, åbne nye miljøer for denne lille bot at udforske.
Denne næste generation af HAMR bruger multifunktionelle trædepuder, der er afhængige af overfladespænding og overfladespændingsinduceret opdrift, når HAMR skal svømme, men kan også påføre en spænding for at bryde vandoverfladen, når HAMR skal synke. Denne proces kaldes elektrobefugtning, som er reduktionen af kontaktvinklen mellem et materiale og vandoverfladen under en påført spænding. Denne ændring af kontaktvinkel gør det lettere for genstande at bryde vandoverfladen.
Bevægelse på vandoverfladen gør det muligt for en mikrorobot at undgå neddykkede forhindringer og reducerer modstanden. Ved at bruge fire par asymmetriske klapper og specialdesignede svømmegange, HAMR robo-padler på vandoverfladen for at svømme. Udnytter den ustabile interaktion mellem robottens passive klapper og det omgivende vand, robotten genererer svømmegange, der ligner en dykkerbilles. Dette giver robotten mulighed for effektivt at svømme frem og dreje.
"Denne forskning viser, at mikrorobotik kan udnytte fysik i lille skala - i dette tilfælde overfladespænding - til at udføre funktioner og kapaciteter, der er udfordrende for større robotter, " sagde Kevin Chen, en postdoc-stipendiat ved Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) og førsteforfatter af papiret.

HAMRs multifunktionelle trædepuder er afhængige af overfladespænding og overfladespændingsinduceret opdrift, når HAMR skal svømme, men kan også påføre en spænding for at bryde vandoverfladen, når HAMR skal synke. Kredit:Yufeng Chen, Neel Doshi, og Benjamin Goldberg/Harvard University
Den seneste forskning er publiceret i tidsskriftet Naturkommunikation .
"HAMRs størrelse er nøglen til dens ydeevne, " sagde Neel Doshi, kandidatstuderende ved SEAS og medforfatter til papiret. "Hvis det var meget større, det ville være udfordrende at støtte robotten med overfladespænding, og hvis den var meget mindre, robotten er muligvis ikke i stand til at generere nok kraft til at bryde den."
HAMR vejer 1,65 gram (ca. lige så meget som en stor papirclips), kan bære 1,44 gram ekstra nyttelast uden at synke og kan padle sine ben med en frekvens på op til 10 Hz. Den er belagt med Parylene for at forhindre, at den kortslutter under vand.
En gang under vandoverfladen, HAMR bruger den samme gangart til at gå, som den gør på tørt land og er lige så mobil. At vende tilbage til tørt land står HAMR over for en enorm udfordring fra vandrummet. En vandoverfladespændingskraft, der er to gange robotvægten, skubber ned på robotten, og derudover forårsager det inducerede drejningsmoment en dramatisk forøgelse af friktion på robottens bagben. Forskerne stivnede robottens transmission og installerede bløde puder på robottens forben for at øge nyttelastkapaciteten og omfordele friktionen under klatring. Endelig, går op ad en beskeden stigning, robotten er i stand til at bryde ud af vandets lastrum.
"Denne robot illustrerer godt nogle af udfordringerne og mulighederne med små robotter, " sagde senior forfatter Robert Wood, Charles River professor i ingeniørvidenskab og anvendt videnskab ved SEAS og kernefakultetsmedlem af Harvard Wyss Institute for Biologically Inspired Engineering. "Skrumpning giver muligheder for øget mobilitet - såsom at gå på vandoverfladen - men også udfordringer, da de kræfter, som vi tager for givet i større skalaer, kan begynde at dominere på størrelse med et insekt."
Næste, forskerne håber at kunne forbedre HAMRs bevægelse yderligere og finde en måde at vende tilbage til land uden en rampe, måske inkorporerer gekko-inspirerede klæbemidler eller impulsive hoppemekanismer.
 Varme artikler
Varme artikler
-
 Sådan laver du en vakuumrør Light UpThomas Edison, der opfandt lyspæren, eksperimenterede med sin carbon filamentlampe i 1883, da han opdagede at indsætte et stykke metal i toppen af pæren, da filamentet blev tændt forårsaget strøm ti
Sådan laver du en vakuumrør Light UpThomas Edison, der opfandt lyspæren, eksperimenterede med sin carbon filamentlampe i 1883, da han opdagede at indsætte et stykke metal i toppen af pæren, da filamentet blev tændt forårsaget strøm ti -
 Begrænsning af mindreåriges adgang til porno- og gamblingsider:god idé, men teknisk vanskeligKredit:CC0 Public Domain Australien bør arbejde hen imod at vedtage et obligatorisk aldersbekræftelsessystem for hasardspil og pornografiske websteder, ifølge en anbefaling fra det føderale parlam
Begrænsning af mindreåriges adgang til porno- og gamblingsider:god idé, men teknisk vanskeligKredit:CC0 Public Domain Australien bør arbejde hen imod at vedtage et obligatorisk aldersbekræftelsessystem for hasardspil og pornografiske websteder, ifølge en anbefaling fra det føderale parlam -
 Amazon HQ-udvidelse betyder hård kamp om talenterDenne 20. maj 2015, fil foto, viser New Yorks finansdistrikt, forgrunden, Brooklyn Bridge og East River, centrum, og i det fjerne Brooklyn set fra observatoriet ved One World Trade Center. Nogle af de
Amazon HQ-udvidelse betyder hård kamp om talenterDenne 20. maj 2015, fil foto, viser New Yorks finansdistrikt, forgrunden, Brooklyn Bridge og East River, centrum, og i det fjerne Brooklyn set fra observatoriet ved One World Trade Center. Nogle af de -
 Satellitdesign anvendt på superyachtKredit:Royal Huisman Den hollandske skibsbygger Royal Huisman anvendte den samme sideløbende ingeniørproces udviklet af ESA til rummissioner til designet af superyacht Sea Eagle II, skal blive ver
Satellitdesign anvendt på superyachtKredit:Royal Huisman Den hollandske skibsbygger Royal Huisman anvendte den samme sideløbende ingeniørproces udviklet af ESA til rummissioner til designet af superyacht Sea Eagle II, skal blive ver
- Tusindvis af havfiskerbåde kunne bruge tvangsarbejde - vi brugte AI og satellitdata til at finde de…
- Virtuelle rum afspejler indkomstulighed
- Ny platform genererer hybrid lys-stof excitationer i højt ladet grafen
- Tesla cybertruck bestiller nær 150, 000 dage efter kaotisk lancering
- Vestantarktis iskollaps kan forhindres ved at sne havvand på den
- Planer om en modulopbygget marsbase, der ville give sin egen strålingsafskærmning