


Første machine learning -metode, der er i stand til præcis ekstrapolering
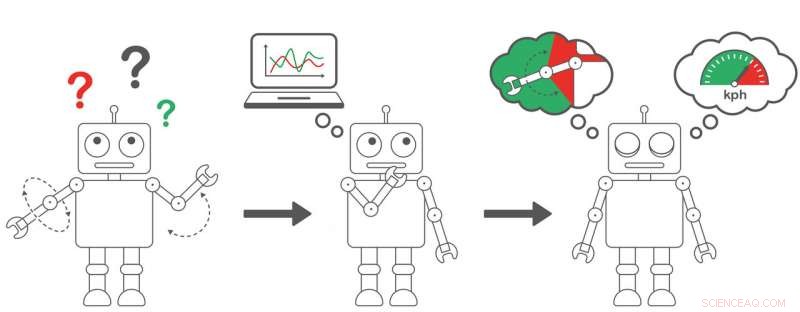
En robot skal lære om sin krop og miljøet. Den prøver et par forskellige bevægelser og bruger algoritmen. Den kan så forudsige, hvad der vil ske med større bevægelser og ved højere hastigheder. Kredit:IST Austria/Birgit Rieger
At forstå, hvordan en robot vil reagere under forskellige forhold, er afgørende for at garantere dens sikre drift. Men hvordan ved du, hvad der vil knække en robot uden faktisk at beskadige den? En ny metode udviklet af forskere ved Institut for Videnskab og Teknologi Østrig (IST Østrig) og Max Planck Institut for Intelligente Systemer (MPI for Intelligente Systemer) er den første maskinlæringsmetode, der kan bruge observationer foretaget under sikre forhold til at lave præcise forudsigelser for alle mulige forhold styret af den samme fysiske dynamik. Specielt designet til virkelige situationer, deres metode giver enkel, fortolkelige beskrivelser af den underliggende fysik. Forskerne vil præsentere deres resultater i morgen på dette års prestigefyldte International Conference for Machine Learning (ICML).
I fortiden, maskinlæring var kun i stand til at interpolere data - at lave forudsigelser om situationer, der er "mellem" andre, kendte situationer. Den var ude af stand til at ekstrapolere – lave forudsigelser om situationer uden for det kendte – fordi den lærer at passe de kendte data så tæt som muligt lokalt, uanset hvordan den klarer sig uden for disse situationer. Ud over, at indsamle tilstrækkelige data til effektiv interpolation er både tids- og ressourcekrævende, og kræver data fra ekstreme eller farlige situationer. Men nu, Georg Martius, tidligere ISTFELLOW og IST Østrig postdoc, og siden 2017 gruppeleder hos MPI for Intelligente Systems i Tübingen, Subham S. Sahoo, en ph.d. studerende også på MPI for Intelligente Systems, og Christoph Lampert, professor ved IST Østrig, udviklet en ny maskinlæringsmetode, der løser disse problemer, og er den første maskinlæringsmetode til præcist at ekstrapolere til usete situationer.
Nøgletræk ved den nye metode er, at den stræber efter at afsløre den sande dynamik i situationen:den tager data ind og returnerer de ligninger, der beskriver den underliggende fysik. "Hvis du kender de ligninger, siger Georg Martius, "så kan du sige, hvad der vil ske i alle situationer, selvom du ikke har set dem." Med andre ord, det er det, der gør det muligt for metoden at ekstrapolere pålideligt, gør den unik blandt maskinlæringsmetoder.
Teamets metode adskiller sig også på flere andre måder. Først, de endelige tilnærmelser, der tidligere blev produceret under maskinlæring, var alt for komplekse til, at et menneske kunne forstå eller arbejde med. I den nye metode, de resulterende ligninger er langt enklere:"Vores metode ligninger er noget, du ville se i en lærebog - enkel og intuitiv, " siger Christoph Lampert. Sidstnævnte er en anden vigtig forskel:andre maskinlæringsmetoder giver ingen indsigt i forholdet mellem betingelser og resultater - og dermed, ingen intuition om, hvorvidt modellen overhovedet er plausibel. "På alle andre forskningsområder, vi forventer modeller, der giver fysisk mening, der fortæller os hvorfor, "tilføjer Lampert." Dette er, hvad vi skal forvente af maskinlæring, og hvad vores metode giver." Til sidst, for at garantere fortolkning og optimere til fysiske situationer, teamet baserede deres læringsmetode på en anden type rammer. Dette nye design er enklere end tidligere metoder, hvilket i praksis betyder, at der skal mindre data til for at give samme eller endnu bedre resultater.
Og det er ikke kun teori:"I min gruppe, vi arbejder faktisk på at udvikle en robot, der bruger denne type læring. I fremtiden, robotten ville eksperimentere med forskellige bevægelser, derefter være i stand til at bruge maskinlæring til at afdække de ligninger, der styrer dens krop og bevægelse, tillader det at undgå farlige handlinger eller situationer, " tilføjer Martius. Mens robotter er et aktivt forskningsområde, metoden kan bruges med enhver type data, fra biologiske systemer til røntgenovergangsenergier, og kan også integreres i større maskinlæringsnetværk.
 Varme artikler
Varme artikler
-
 Google forbereder sin Duplex -bot til en sommerudrulningI denne tirsdag, 26. juni kl. 2018, foto Nick Fox, VP for Assistant og Søg efter Google, taler om Duplex -programmet, som giver brugeren mulighed for at booke en aftale over telefonen, i Orens Hummus
Google forbereder sin Duplex -bot til en sommerudrulningI denne tirsdag, 26. juni kl. 2018, foto Nick Fox, VP for Assistant og Søg efter Google, taler om Duplex -programmet, som giver brugeren mulighed for at booke en aftale over telefonen, i Orens Hummus -
 Watchdog godkender skelsættende australsk mediefusionNine-Fairfax-fusionen er den første aftale under en kontroversiel medielov, der fjernede restriktioner for virksomheder, der ejer aviser, radio- og gratis-tv-stationer i samme by En skelsættende f
Watchdog godkender skelsættende australsk mediefusionNine-Fairfax-fusionen er den første aftale under en kontroversiel medielov, der fjernede restriktioner for virksomheder, der ejer aviser, radio- og gratis-tv-stationer i samme by En skelsættende f -
 Etiopisk rapport siger, at fejlagtige sensordata førte til jetstyrtI denne onsdag den 13. marts, 2019 filbillede, en sørgende slægtning, der mistede sin kone i flystyrtet, bliver hjulpet af et medlem af sikkerhedsstyrker og andre i nærheden af Bishoftu, i Etiopien,
Etiopisk rapport siger, at fejlagtige sensordata førte til jetstyrtI denne onsdag den 13. marts, 2019 filbillede, en sørgende slægtning, der mistede sin kone i flystyrtet, bliver hjulpet af et medlem af sikkerhedsstyrker og andre i nærheden af Bishoftu, i Etiopien, -
 Toyotas humanoid duplikerer bevægelser i robotisk mobilitetI denne 18. december, 2019, Foto, Toyota Motor Corp.s menneskeformede T-HR3-robot, ret, fjernstyres af medarbejderen, venstre, under en demonstration i Tokyo. Toyotas opgraderede version af den mennes
Toyotas humanoid duplikerer bevægelser i robotisk mobilitetI denne 18. december, 2019, Foto, Toyota Motor Corp.s menneskeformede T-HR3-robot, ret, fjernstyres af medarbejderen, venstre, under en demonstration i Tokyo. Toyotas opgraderede version af den mennes
- Kinas krig mod forurening viser lovende resultater, undersøgelse finder
- Planlægning grønnere, sundere byer fra data og op
- Virkeligheden af accentændring
- At komme til hjertet af kortlægning af arytmi-relaterede excitationer
- Voldsinterventioner i hjemmet:Tanker om, hvad der virker for at imødegå denne dyre kriminalitet
- NASAs Hi-C lancerer for at undersøge solens corona