


En ToM-baseret algoritme til estimering af menneskelige hensigter til robotiserede lagre
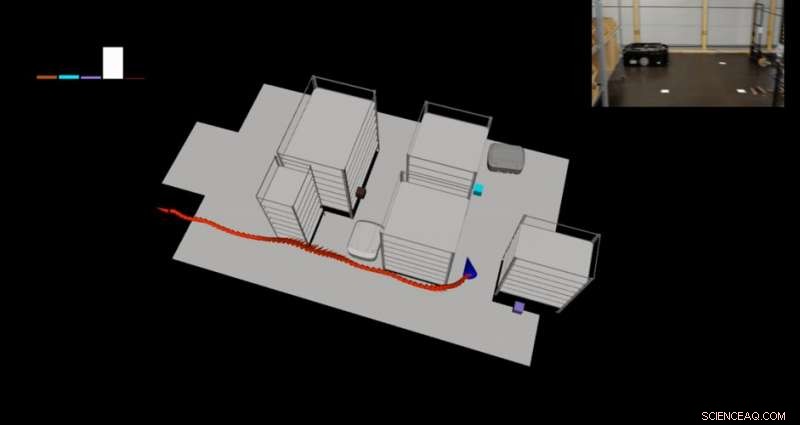
Den menneskelige arbejders bane i Warehouse-testområdet. Lokaliseringsdataene leveres af Hololens' lokaliseringsalgoritme. Øverst til højre kan førstepersonsvisningen af arbejderen ses. Øverst til venstre er sandsynligheden for, at arbejderen går til et bestemt mål. Kredit:Petkovic et al.
Den hurtige vækst af logistikvirksomheder har skabt et behov for mere udviklede og effektive lagersystemer. Fremskridt inden for robotteknologi kan hjælpe med at imødekomme disse behov ved at automatisere opgaver, der i øjeblikket udføres af mennesker, fremskynde arbejdsgangen markant.
For at fungere sikkert og effektivt, imidlertid, robotlagerassistenter bør være i stand til at genkende intentionerne hos deres menneskelige operatører. Forskere ved University of Zagreb og Karlsruhe Institute of Technology har for nylig udviklet en algoritme til estimering af menneskelige hensigter baseret på teorier om sindet (ToM). ToM er den menneskelige evne til at genkende hensigter, tro, ønsker, følelser, og mentale tilstande hos andre mennesker.
"Vores forskning blev født ud af EU's Horizon 2020-projekt SafeLog, som har til formål at tillade sikker adgang for mennesker til fuldstændig automatiserede lagre, hvor mobile robotter bærer stativer rundt, uden at lukke hele flåden af robotter, "David Puljiz, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Dette gøres ved at bruge en specialdesignet sikkerhedsvest og en AR-enhed til at guide og hjælpe arbejderen med at navigere i dette miljø."
For at øge sikkerheden, lagersikkerhedssystemet, som forskerne har udtænkt, planlægger en robots vej, så den ikke kolliderer med menneskelige arbejderes. For at det skal virke, den skal vide, hvor den menneskelige operatør er på vej hen, især hvis han ikke er på vej til et tidligere aftalt sted.
Puljiz og hans kolleger observerede individuelle menneskelige arbejderes bevægelser i lagermiljøer og validerede dem med hensyn til deres målplaceringer, ved hjælp af en tilgang kaldet generaliseret Voronoi diagram baseret planlægning. Disse observationer blev derefter ført til en skjult Markov-model, som kan vurdere en arbejders hensigter online, når han navigerer i skiftende miljøer.
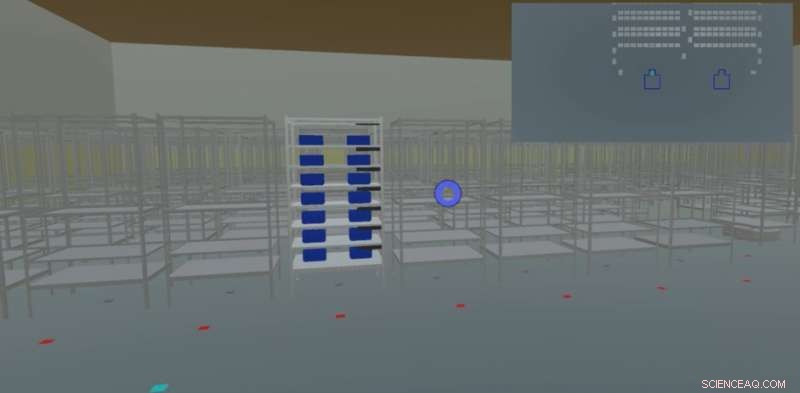
Førstepersonsvisning i VR-miljøet, bruges til at teste algoritmen i storskala scenarier. Øverst til venstre kan man se et fugleperspektiv af området omkring arbejderen inklusive de mobile robotter. Kredit:Puljiz et al.
"Den foreslåede ToM-baserede menneskelige intentions-estimeringsalgoritme til fleksible robotiserede lagre er baseret på skjult Markov-modelbevægelsesvalidering, " Tomislav Petkovic, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Vi observerer arbejderens bevægelse og validerer den i forhold til målplaceringerne ved hjælp af generaliseret Voronoi-diagrambaseret stiplanlægning. Disse observationer behandles derefter af den skjulte Markov-modelramme, som estimerer arbejdernes hensigter online og er i stand til at håndtere skiftende miljøer. LAMOR lab ved University of Zagreb har udviklet algoritmens backend:bevægelsesvalidering og målestimering."
For at evaluere modellens effektivitet, IPR Lab ved Karlsruhe Institute of Technology udførte intentionsestimateksperimenter i et lille lagertestmiljø, ved hjælp af Microsoft Hololens AR-briller. Forskerne udførte yderligere evalueringer i større virtuelle varehuse, ved hjælp af VR-teknologi. De fandt ud af, at deres rammer effektivt kunne vurdere lagermedarbejdernes intentioner, med bemærkelsesværdig præcision.
"Jeg tror, at det mest meningsfulde aspekt af vores undersøgelse er, at AR-enheder kan bruges til mere end underholdning eller markedsføring og faktisk kan være nyttige i industrielle omgivelser, "Forskningsfeltet er ret nyt, og der er mange muligheder på dette område," sagde Puljiz.
I fremtiden, algoritmen til estimering af menneskelige hensigter i realtid udviklet af Puljiz og hans kolleger kan øge sikkerheden og effektiviteten af lagerbaserede robotsystemer. For eksempel, det kunne hjælpe med udviklingen af mere lydhøre robotter, der kan estimere intentionerne hos menneskelige operatører omkring dem, tilpasse og planlægge deres ruter i overensstemmelse hermed.
"I det fremtidige arbejde, vi kunne udvide algoritmen til 3D-rum og følge blikkets retning i 3D for at bestemme, for eksempel, hvis arbejderen har til hensigt at vælge den forkerte genstand, eller hvis han er bekymret for, at en robot nærmer sig, " sagde Puljiz. "Der er masser af andre muligheder, inklusive håndsporingsintegrationer."
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Fleksibel distribution af brugergrænseflader til allestedsnærværende interaktion med flere enhede…Forskningsgruppe af professor Insik Shin. Kredit:Korea Advanced Institute of Science and Technology (KAIST) KAIST-forskere har udviklet mobil softwareplatformteknologi, der gør det muligt for en m
Fleksibel distribution af brugergrænseflader til allestedsnærværende interaktion med flere enhede…Forskningsgruppe af professor Insik Shin. Kredit:Korea Advanced Institute of Science and Technology (KAIST) KAIST-forskere har udviklet mobil softwareplatformteknologi, der gør det muligt for en m -
 Stereovision ved hjælp af computerarkitektur inspireret af hjernenFIGUR 1:Et fuldt hændelsesbaseret stereovisionssystem bestående af et par Dynamic Vision Sensors (venstre), som sender deres output til en klynge af TrueNorth-processorer (højre). Kredit:IBM The B
Stereovision ved hjælp af computerarkitektur inspireret af hjernenFIGUR 1:Et fuldt hændelsesbaseret stereovisionssystem bestående af et par Dynamic Vision Sensors (venstre), som sender deres output til en klynge af TrueNorth-processorer (højre). Kredit:IBM The B -
 Kortere timer øger salget i overanstrengt Japan:MicrosoftMicrosoft Japan-undersøgelse viser, at fire dages arbejdsuger og andre reformer både øger salget og reducerer omkostningerne I et land, der er berygtet for overarbejde, Microsoft Japan prøvede en
Kortere timer øger salget i overanstrengt Japan:MicrosoftMicrosoft Japan-undersøgelse viser, at fire dages arbejdsuger og andre reformer både øger salget og reducerer omkostningerne I et land, der er berygtet for overarbejde, Microsoft Japan prøvede en -
 Din reaktion på billeder af Leonardo DiCaprio, dyr kunne låse din næste smartphone opKredit:Chen Song, Universitetet i Buffalo For at overvinde adgangskodetræthed, mange smartphones inkluderer ansigtsgenkendelse, fingeraftryksscanninger og andre biometriske systemer. Problemet me
Din reaktion på billeder af Leonardo DiCaprio, dyr kunne låse din næste smartphone opKredit:Chen Song, Universitetet i Buffalo For at overvinde adgangskodetræthed, mange smartphones inkluderer ansigtsgenkendelse, fingeraftryksscanninger og andre biometriske systemer. Problemet me
- Forskere optrævler hemmelighederne om, hvordan natursten lyser i mørke
- Donald Trumps brug af ydmygelse kan have katastrofale konsekvenser - en psykolog forklarer hvorfor
- Byer slår forstæder med inspirerende banebrydende innovationer
- Forskere modellerer laviner i to dimensioner
- Iagttager et molekyls strækning og bøjning i realtid
- Er drømmen om Cold Fusion stadig en mulighed?