


Et end-to-end imiteret læringssystem til hastighedskontrol af autonome køretøjer
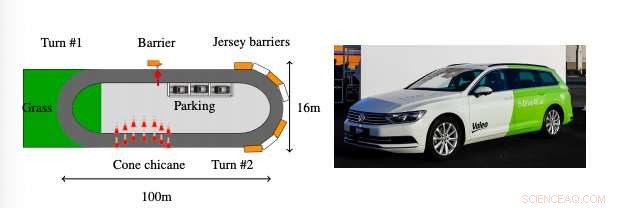
Testbane (venstre) og demonstrationsbil brugt (højre). Kredit:Wirbel et al.
Forskere ved Valeo, en teknologivirksomhed specialiseret i bilinnovation, har for nylig udviklet et ende-til-ende-imitationssystem til hastighedskontrol i bilen. Deres tilgang, skitseret i et papir, der er forududgivet på arXiv, bruger et neuralt netværk med langtidshukommelse (LSTM), en type recurrent neural network (RNN), der kan lære langsigtede afhængigheder.
"Valeo er verdens førende inden for sensorer, ører og øjne på autonome biler, og har allerede opnået adskillige verdensnyheder, såsom de nylige eksperimenter med vores Valeo Drive4U køretøj, den første autonome bil, der blev demonstreret i Paris' gader, Emilie Wirbel, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Mit team og jeg arbejder i et af virksomhedens 56 forsknings- og udviklingscentre, undersøge, hvordan deep learning kan bruges til at opnå bedre beslutninger og kontrol med autonome biler. Formålet med denne forskning var at bevise, at det er muligt at håndtere komplekse situationer, der kan opstå i bymiljøer, ved kun at bruge kameraer og lære af, hvad en menneskelig chauffør kan gøre."
Det nye system udviklet af Wirbel og hendes kolleger anvender et kunstigt neuralt netværk (ANN), der er afhængig af dyb læringsteknikker. Netværket fodres med demonstrationer af et menneske, der betjener en bil, som er taget fra et frontalkamera og dermed ligner det, personen så, mens han kørte.
Det neurale netværk trænes derefter til at efterligne førerens handlinger, især med fokus på at gengive bilens aktuelle hastighed. For eksempel, når et inputbillede indeholder et hastighedsbegrænsningspanel på 50 km/t, netværket sikrer, at bilen ikke kører hurtigere end 50 km/t.
"Når der er en anden bil foran os, en menneskelig chauffør vil sænke farten i overensstemmelse hermed, og netværket bør lære at gøre det samme, Wirbel forklarede. "Vores tilgang forsøger at kopiere, hvordan et menneske lærer og kører. Netværket modtager kun information fra frontkameraet og behøver ikke eksplicit perception, for eksempel, relateret til lyskryds eller vognbaner, ligesom en menneskelig chauffør ikke har en eksplicit model af præcis, hvor linjerne er, og hvad deres form er."
Efter at have trænet deres neurale netværk, Wirbel og hendes kolleger testede det i et simuleringsmiljø og integrerede det derefter i en rigtig bil, evaluerer sin præstation på en udfordrende testbane. De fandt ud af, at deres system effektivt reagerede på komplekse situationer, kontrol af bilens hastighed, hvor det er nødvendigt (f.eks. at sænke farten ved trafikkegler og skarpe sving, standsning ved bomme og når man nærmer sig advarselsskilte, etc.).
"Vores undersøgelse viser, at komplekse situationer, såsom arbejdszoner, uventede forhindringer, etc., kan håndteres ved blot at observere, hvad et menneske ville gøre og derefter gengive det i nye, lignende situationer, " sagde Wirbel. "Dette betyder, at så længe vi har nok demonstrationsdata, vi kan håndtere use cases, som menneskelige chauffører med rimelighed ville håndtere. Dette kunne bruges i komplekse interaktionssituationer i kombination med de mere klassiske tilgange, at gøre køretøjet i stand til at reagere konsekvent og smart."
Systemet udviklet af Wirbel og hendes kolleger har opnået meget lovende resultater og kan snart anvendes på autonome køretøjer, fører til mere effektiv hastighedskontrol og mere intuitiv kørsel. Forskerne planlægger at udvide deres proof of concept til mere komplekse situationer, lære deres system at håndtere en bredere vifte af interaktioner med andre køretøjer på vejen, samt tilføje mere komplekse manøvrer, såsom at skifte vognbane, dreje i kryds, eller navigere i rundkørsler.
"Vi vil også gerne arbejde på systemets forklarlighed og kompatibilitet med eksisterende autonome køretøjer, at give slutbrugeren en forklaring på, hvordan netværket opfatter sit miljø, og hvorfor det tager sine beslutninger, " tilføjede Wirbel. "Forskningskøreplanen er meget bred, så vi deltager i og bidrager til store videnskabelige konferencer for at følge med i den nyeste udvikling på dette område. Vores rolle som et R&D-team er også at give resten af Valeo de rigtige nøgler og ekspertise til at bringe vores proofs of concept tættere på produktionen."
© 2019 Science X Network
Sidste artikelBekæmpelse af drivhusgasser
Næste artikelDen tidligere Nissan-chef Ghosn kan tilbringe seks måneder i fængsel
 Varme artikler
Varme artikler
-
 Trafikpropper genovervejetKredit:Moab Republic På trods af bestræbelser på at fremme et skift til bæredygtig transport, trafikpropper er ofte i fokus for debatter om mobilitet. Den globale efterspørgsel efter biler steg ma
Trafikpropper genovervejetKredit:Moab Republic På trods af bestræbelser på at fremme et skift til bæredygtig transport, trafikpropper er ofte i fokus for debatter om mobilitet. Den globale efterspørgsel efter biler steg ma -
 Naturgasmotor kan reducere smog fra tunge lastbilerKent Johnson, en assisterende forskningsingeniør ved Center for Miljøforskning og Teknologi. Kredit:University of California - Riverside University of California, Riverside Bourns College of Engin
Naturgasmotor kan reducere smog fra tunge lastbilerKent Johnson, en assisterende forskningsingeniør ved Center for Miljøforskning og Teknologi. Kredit:University of California - Riverside University of California, Riverside Bourns College of Engin -
 E-scootere synes nu mindre tilbøjelige til at køre folk væk fra fortoveKredit:CC0 Public Domain Hvilken forskel et år kan gøre. Det er midt på formiddagen i downtown Los Angeles, og der er e-scootere på alle større gader. Men i modsætning til sidste sommer, som så k
E-scootere synes nu mindre tilbøjelige til at køre folk væk fra fortoveKredit:CC0 Public Domain Hvilken forskel et år kan gøre. Det er midt på formiddagen i downtown Los Angeles, og der er e-scootere på alle større gader. Men i modsætning til sidste sommer, som så k -
 Nedskæring af godsemissionerKredit:University of Cambridge Forskere, i samarbejde med førende supermarkedskæde Waitrose har udviklet et mere aerodynamisk trailerdesign til ledbiler - der reducerer brændstofforbrug og foruren
Nedskæring af godsemissionerKredit:University of Cambridge Forskere, i samarbejde med førende supermarkedskæde Waitrose har udviklet et mere aerodynamisk trailerdesign til ledbiler - der reducerer brændstofforbrug og foruren