


Virtuelle test for autonome køresystemer
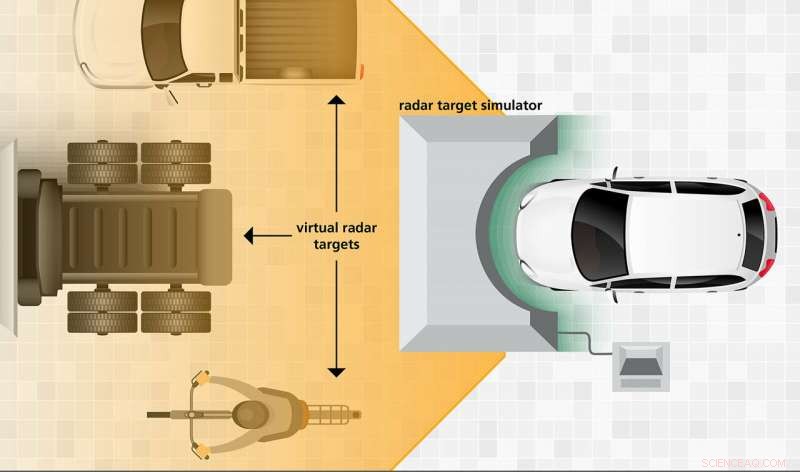
Illustration af ATRIUM-radarmålsimulatoren. Kredit:Fraunhofer FHR
Sensorer i autonome køretøjer skal være ekstremt pålidelige, da bilister i fremtiden ikke længere konstant vil overvåge trafikken under kørslen. Tidligere blev disse sensorer udsat for besværlige vejtests. Den nye ATRIUM-testanordning fra Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR gør det nu muligt at flytte en stor del af disse vejprøver til laboratoriet. ATRIUM lægger op til et show for køretøjets radarsensor, genererer kunstig natur, der kommer meget tæt på de faktiske forhold, man møder i gadetrafikken.
Morgendagens bil kører sig selv. Passagerer vil bevæge sig ned ad vejen, som om de blev kørt af en privat chauffør, mens de nyder samtalen, læse en avis eller måske se en video. Selvom førerassistentsystemer såsom automatisk afstandskontrol ikke længere er nye på markedet, der vil stadig gå flere år, før helt autonome biler kommer på gaden. Dette skyldes, at den involverede teknologi skal være absolut pålidelig. Sensorerne er her den afgørende faktor:F.eks. nutidens radarsensorer er allerede i stand til selvstændigt at detektere forhindringer og aktivere bremserne i tilfælde af fare. Disse og andre sensorer testes grundigt, før de installeres i bilen. Og autonome køretøjer kræver et endnu højere niveau af pålidelighed, da hvis føreren ikke længere sidder ved rattet, køretøjsproducenten kan meget vel være i sidste ende ansvarlig for at undgå en ulykke.
Derfor stiller bilproducenter relativt høje krav, når det kommer til sensorpålidelighed. De kræver sensorer, der ikke forårsager mere end en enkelt fejl over køreafstande på flere millioner kilometer, hvilket betyder, at nutidens biler ofte skal gennemføre meget lange vejprøver. "Det er mange kilometer, " siger Dr.-Ing. Thomas Dallmann, Leader Research Group Aachen ved Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR. "Oven i købet, flere sensorer skal testes for statistisk at bevise deres pålidelighed. Det betyder, at flere testkøretøjer med sensorer skal bruge ret lang tid på vejen." En anden vanskelighed:Hvis der opstår en fejl efter flere tusinde kilometer, sensoren skal optimeres, og vejtestene skal begynde forfra, en ekstremt tidskrævende proces.
Flytning af vejprøver til laboratoriet
For at forenkle denne situation, der gøres forsøg på at simulere virkeligheden og bringe vejforsøgene ind i laboratoriet. Denne type laboratorietest findes allerede for radarsensorer. Radarsensorer udsender et radiosignal, der reflekteres af forskellige objekter. Baseret på ekkoet, elektroniske sensorsystemer kan derefter analysere omgivelserne, måling af afstanden til detekterede objekter og hastigheden, hvormed de bevæger sig.

Enkeltkanalsversion af ATRIUM-radarmålsimulatoren. Kredit:Fraunhofer FHR
Dette princip er allerede blevet simuleret i laboratoriet ved hjælp af såkaldte radarmålsimulatorer. Disse simulatorer samler radarbølgerne udsendt af køretøjets radar og ændrer radarsignalet til at opføre sig, som om det havde stødt på objekter. Simulatoren returnerer derefter informationen til bilen i form af et kunstigt ekkobillede. Således genererer radarmålsimulatoren et simuleret landskab til køretøjets radar. Fordelen er indlysende:Testriggen med bilradar og radarmålsimulator kan køre i laboratoriet dag og nat, uden at skulle sætte en bil ud på gaden.
Desværre, de få radarmålsimulatorer, der findes på markedet i dag, er ikke i nærheden af at kunne generere et komplet ekkolandskab. "De fleste af modellerne kan kun generere et meget begrænset billede med et encifret antal refleksioner tilbage til bilens radar, " siger Dallmann. "Det er et ekstremt lille antal i forhold til situationen i et naturligt miljø." ægte landskab indeholder hundredvis af reflekterende objekter:mennesker, biler, træer, trafiksignaler. Selv et enkelt køretøj i trafikken kan generere forskellige refleksioner fra forskellige vinkler, for eksempel en personbil, hvis kofangere, hjul og sidespejle reflekterer forskelligt. "Vi er stadig meget langt væk fra en realistisk indstilling, når det kommer til at teste sensorer til autonom kørsel, " fortsætter ingeniøren.
Radarmålsimulator genererer så mange som 300 refleksioner
Derfor er Dallmann og hans team ved at udvikle en ny, højere ydeevne radarmålsimulator kaldet ATRIUM (det tyske akronym for "Automotive test environment for radar in-the-loop testing and measurements"), i stand til at generere væsentligt mere reflekterende objekter. Det nuværende mål for Fraunhofer FHR er at være i stand til at generere 300 refleksioner, når projektet slutter, et enormt mål. "Dette vil betyde, at ATRIUM kan præsentere bilens radarsensor med en relativt naturtro scene, noget som en drive-in-film til radarsensoren."
Da der er indgivet en patentansøgning for ATRIUM-teknologien, Thomas Dallmann kan endnu ikke afsløre nogen detaljer. Men han kan sige:"Vi har optimeret strukturen af transmissionskanalerne, gør dem meget mere omkostningseffektive. Som resultat, refleksionerne kan repræsenteres på en sådan måde, at de når radaren fra en række forskellige retninger." Dette kan gøre det muligt at teste nye sensorer til autonome køretøjer i fuldt omfang og under meget realistiske forhold i laboratoriet. "I fremtiden , vi vil være i stand til at køre meget komplekse tests, hvilket vil gøre det muligt i høj grad
reducere den tid, der er involveret i vejtests." Dallmann og hans kolleger vil præsentere laboratoriets testfacilitet med køretøjsradar og ATRIUM-radarmålsimulatoren på Automotive Testing Expo i Stuttgart fra 21. til 23. maj.
 Varme artikler
Varme artikler
-
 Kan angribere injicere ondskab i medicinske billeder? Falske vækster hist og herNetværksarkitekturen, lag, og parametre, der bruges til både injektion (GANinj) og fjernelse (GANrem) netværk. Kredit:arXiv:1901.03597 [cs.CR] Forskere har fundet mere grund til at være bekymret o
Kan angribere injicere ondskab i medicinske billeder? Falske vækster hist og herNetværksarkitekturen, lag, og parametre, der bruges til både injektion (GANinj) og fjernelse (GANrem) netværk. Kredit:arXiv:1901.03597 [cs.CR] Forskere har fundet mere grund til at være bekymret o -
 Kombination af eksperter og automatisering i 3D-printBilleder af PDMS 3D -udskrifter, der er lavet med S3D CAD -skiver til at bestemme værktøjsbanen. Kredit:Sara Abdollahi, Alexander Davis, John H. Miller, Adam W. Feinberg Forskere ved Carnegie Mell
Kombination af eksperter og automatisering i 3D-printBilleder af PDMS 3D -udskrifter, der er lavet med S3D CAD -skiver til at bestemme værktøjsbanen. Kredit:Sara Abdollahi, Alexander Davis, John H. Miller, Adam W. Feinberg Forskere ved Carnegie Mell -
 Teknologisektoren bekymrer sig, mens handelsspændinger mellem USA og Kina ulmerDa handelsspændingerne mellem USA og Kina løber højt, kritikere af Beijings politik siger, at amerikanske teknologivirksomheder står over for flere restriktioner på det kinesiske marked end deres kine
Teknologisektoren bekymrer sig, mens handelsspændinger mellem USA og Kina ulmerDa handelsspændingerne mellem USA og Kina løber højt, kritikere af Beijings politik siger, at amerikanske teknologivirksomheder står over for flere restriktioner på det kinesiske marked end deres kine -
 Den dobbelte kant af gennemgribende personaliseringKredit:Shutterstock Enhver, der bruger online shopping, sociale medier eller endda e -mail oplever frivilligt - men ikke nødvendigvis bevidst - indflydelsen fra personlige teknologier. Den profile
Den dobbelte kant af gennemgribende personaliseringKredit:Shutterstock Enhver, der bruger online shopping, sociale medier eller endda e -mail oplever frivilligt - men ikke nødvendigvis bevidst - indflydelsen fra personlige teknologier. Den profile
- Fysiksteamet undersøger indflydelse af ioner på atombevægelser
- "How to Calculate a Spiral
- Opdagelse af ruinerne af det gamle tyrkiske monument omgivet af 14 søjler med inskriptioner
- Dække over, krympe, dyrke? Økologiske dækafgrødemetoder undersøgt for ukrudtsbekæmpelse
- Ny analyse finder vej til sikkert at lede varme fra grafen til biologiske væv
- Citizen science-projekt opdager ny brun dværg