


Mød Blue, de lave omkostninger, menneskevenlig robot designet til kunstig intelligens
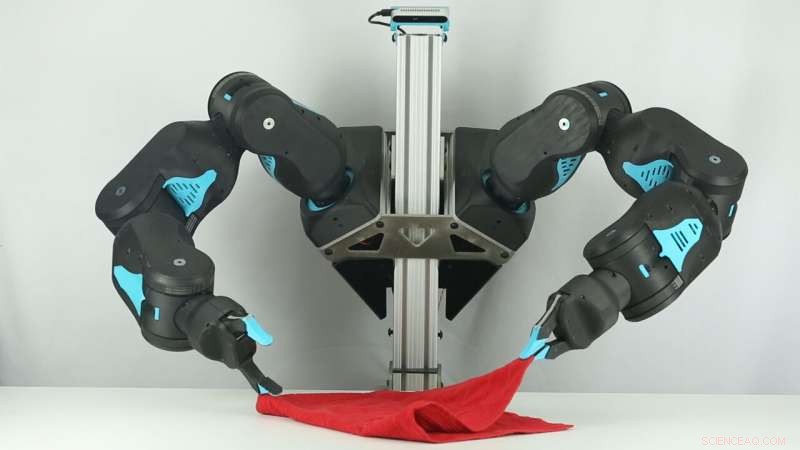
Blue robottens arme - omtrent på størrelse med en menneskelig bodybuilders - blev designet til at drage fordel af de seneste fremskridt inden for kunstig intelligens til at mestre komplicerede, menneskecentrerede opgaver, som at folde håndklæder. Kredit:Philip Downey
Robotter kan have en evne til overmenneskelig styrke og præcision, men de kæmper stadig med nogle grundlæggende menneskelige opgaver – som at folde vasketøj eller lave en kop kaffe.
Indtast blå, en ny lavpris, menneskevenlig robot udtænkt og bygget af et team af forskere ved University of California, Berkeley. Blue blev designet til at bruge de seneste fremskridt inden for kunstig intelligens (AI) og dyb forstærkningslæring til at mestre indviklede menneskelige opgaver, alt imens de forbliver overkommelige og sikre nok til, at enhver kunstig intelligens-forsker - og i sidste ende ethvert hjem - kunne have en.
Blå er udtænkt af Pieter Abbeel, professor i elektroteknik og datalogi ved UC Berkeley, postdoc-stipendiat Stephen McKinley og kandidatstuderende David Gealy. Teamet håber, at Blue vil fremskynde udviklingen af robotteknologi til hjemmet.
"AI har gjort meget for eksisterende robotter, men vi ønskede at designe en robot, der passer til AI, " sagde Abbeel. "Eksisterende robotter er for dyre, ikke trygge omkring mennesker og på samme måde ikke trygge omkring sig selv - hvis de lærer gennem forsøg og fejl, de vil let knække sig selv. Vi ønskede at skabe en ny robot, der passer til AI-alderen snarere end til den høje præcision, sub-millimeter, fabriksautomatiseringstid."
I løbet af de sidste 10 år, Abbeel har været banebrydende for dyb forstærkende læringsalgoritmer, der hjælper robotter med at lære ved at prøve og fejle eller ved at blive guidet af et menneske som en marionet. Han udviklede disse algoritmer ved hjælp af robotter bygget af eksterne virksomheder, som markedsfører dem for titusindvis af dollars.
Blå er holdbar, plastdele og højtydende motorer i alt mindre end $5, 000 til fremstilling og montering. dens arme, hver på størrelse med den gennemsnitlige bodybuilder, er følsomme over for ydre kræfter - som en hånd, der skubber den væk - og har afrundede kanter og minimale klempunkter for at undgå at fange vildfarne fingre. Blues arme kan være meget stive, som et menneske, der bøjer sig, eller meget fleksibel, som et menneske, der slapper af, eller noget midt imellem.

Blå robotten er holdbar, plastdele og højtydende motorer i alt mindre end $5, 000 til fremstilling og montering. Her er dens gribere vist med et gearsæt. Kredit:Philip Downey
I øjeblikket, teamet bygger 10 arme internt, som skal distribueres til udvalgte tidlige brugere. De fortsætter med at undersøge Blues holdbarhed og tackle den formidable udfordring med at fremstille robotten i større skala, hvilket vil ske gennem UC Berkeley spinoff Berkeley Open Arms. Tilmeldinger til at udtrykke interesse for prioriteret adgang starter i dag på det websted,
"Med en billigere robot, enhver forsker kunne have deres egen robot, og den vision er en af de vigtigste drivkræfter bag dette projekt – at få lavet mere forskning ved at have flere robotter i verden, " sagde McKinley.
Fra bevægende statue til smidig som kat
Robotics har traditionelt fokuseret på industrielle applikationer, hvor robotter har brug for styrke og præcision for at udføre gentagne opgaver perfekt hver gang. Disse robotter blomstrer i meget strukturerede, forudsigelige miljøer - langt fra det traditionelle amerikanske hjem, hvor du kan finde børn, kæledyr og snavset vasketøj på gulvet.
"Vi har ofte beskrevet disse industrirobotter som bevægende statuer, " sagde Gealy. "De er meget stive, beregnet til at gå fra punkt A til punkt B og tilbage til punkt A perfekt. Men hvis du befaler dem at gå en centimeter forbi et bord eller en væg, de kommer til at smadre ind i væggen og låse op, bryde sig selv eller bryde muren. Intet godt."
Hvis en AI kommer til at lave fejl og lære ved at gøre i ustrukturerede miljøer, disse stive robotter vil bare ikke fungere. For at gøre eksperimenter sikrere, Blå blev designet til at være kraftkontrolleret - meget følsom over for kræfter udefra, altid at modulere mængden af kraft, den udøver på et givet tidspunkt.
"En af de ting, der er rigtig fede ved designet af denne robot er, at vi kan gøre den kraftfølsom, pæn og reaktiv, eller vi kan vælge at have det meget stærkt og meget stivt, " sagde Gealy. "Forskere kan justere, hvor stiv robotten er, og hvilken slags stivhed – vil du have, at det skal føles som melasse? Vil du have det til at føles som et forår? En kombination af dem? Hvis vi vil have robotter til at bevæge sig mod hjemmet og optræde i disse stadig mere ustrukturerede miljøer, de får brug for den evne."
For at opnå disse evner til lave omkostninger, holdet overvejede, hvilke funktioner Blue havde brug for for at udføre menneskecentrerede opgaver, og hvad det kunne gå uden. For eksempel, forskerne gav Blue en bred vifte af bevægelser - den har led, der kan bevæge sig i samme retninger som en menneskelig skulder, albue og håndled – for at gøre det muligt for mennesker lettere at lære det, hvordan man gennemfører vanskelige manøvrer ved hjælp af virtual reality. Men de adrætte robotarme mangler noget af styrken og præcisionen fra en typisk robot.
"Det, vi indså, var, at du ikke har brug for en robot, der udøver en bestemt kraft for altid, eller en specifik nøjagtighed til enhver tid. Med lidt intelligens, du kan slække på disse krav og tillade robotten at opføre sig mere som et menneske for at udføre disse opgaver, " sagde McKinley.
Blå er i stand til konstant at holde 2 kg vægt med armene helt udstrakt. Men i modsætning til traditionelle robotdesigns, der er karakteriseret ved én konsekvent "kraft/strømgrænse, " Blå er designet til at være "termisk begrænset, " sagde McKinley. Det betyder, at ligner et menneske, den kan udøve en kraft langt over 2 kg i et hurtigt udbrud, indtil dens termiske grænser er nået, og den har brug for tid til at hvile eller køle ned. Det er ligesom hvordan et menneske kan tage en vasketøjskurv op og nemt bære den hen over et rum, men er måske ikke i stand til at bære den samme vasketøjskurv over en kilometer uden hyppige pauser.
"I bund og grund, vi kan få mere ud af en svagere robot." sagde Gealy. "Og en svagere robot er bare mere sikker. Den stærkeste robot er farligst. Vi ønskede at designe den svageste robot, der stadig kunne gøre virkelig nyttige ting."
"Forskere havde udviklet AI til eksisterende hardware og, for omkring tre år siden, vi begyndte at tænke, "Måske kunne vi gøre noget omvendt. Måske kunne vi tænke på, hvilken hardware vi kunne bygge for at udvide AI og arbejde på de to veje sammen, på samme tid, "" sagde McKinley. "Og jeg synes, det er et virkelig dramatisk skift fra den måde, meget forskning har fundet sted."
 Varme artikler
Varme artikler
-
 Ny hydraulisk aktuator vil gøre robotter hårdereDenne figur viser en syvakset hydraulisk robotarm, der brækker betonplader, hver 30 mm tyk. Dette er en prototype til sammenligning med en firbenet robot, der også udvikles i dette projekt af Waseda U
Ny hydraulisk aktuator vil gøre robotter hårdereDenne figur viser en syvakset hydraulisk robotarm, der brækker betonplader, hver 30 mm tyk. Dette er en prototype til sammenligning med en firbenet robot, der også udvikles i dette projekt af Waseda U -
 Der er en grund til at AI er så dårlig til at snakkeKredit:Phonlamai Photo/Shutterstock Undskyld, Det forstod jeg ikke helt. Enhver, der nogensinde har prøvet at have en dybere samtale med en virtuel assistent som Siri, ved, hvor frustrerende det k
Der er en grund til at AI er så dårlig til at snakkeKredit:Phonlamai Photo/Shutterstock Undskyld, Det forstod jeg ikke helt. Enhver, der nogensinde har prøvet at have en dybere samtale med en virtuel assistent som Siri, ved, hvor frustrerende det k -
 Teslas cash burn accelererer, CEO forudser overskud forude (opdatering)I denne 15. april, 2018, fil foto, en usolgt 2018 Model X 100d sidder på en Tesla-forhandlers grund i den sydlige Denver-forstad til Littleton, Colo. Når Tesla offentliggør første kvartals indtjening
Teslas cash burn accelererer, CEO forudser overskud forude (opdatering)I denne 15. april, 2018, fil foto, en usolgt 2018 Model X 100d sidder på en Tesla-forhandlers grund i den sydlige Denver-forstad til Littleton, Colo. Når Tesla offentliggør første kvartals indtjening -
 Forskere skaber spilleregenskabsmodel, der giver mulighed for personlige spilKredit:CC0 Public Domain University of Waterloo forskere har udviklet et nyt værktøj, der vil gøre det muligt for designere af brugeroplevelser at skabe mere effektive, personlige spil og marketin
Forskere skaber spilleregenskabsmodel, der giver mulighed for personlige spilKredit:CC0 Public Domain University of Waterloo forskere har udviklet et nyt værktøj, der vil gøre det muligt for designere af brugeroplevelser at skabe mere effektive, personlige spil og marketin
- Et nyt værktøj til flerlags netværk
- Forskere spørger amerikanere Hvordan ser Gud ud?
- Retsmedicinsk hold afslører 1800-tallets morderes ansigt
- Langtidseffekter af naturbrande
- Knækkende æggeskals nanostruktur:Ny opdagelse kan have vigtige konsekvenser for fødevaresikkerhed…
- I det første, forskere måler præcist, hvordan syntetiske diamanter vokser