


En neurorobotisk tilgang til at bygge robotter med kommunikationsevner
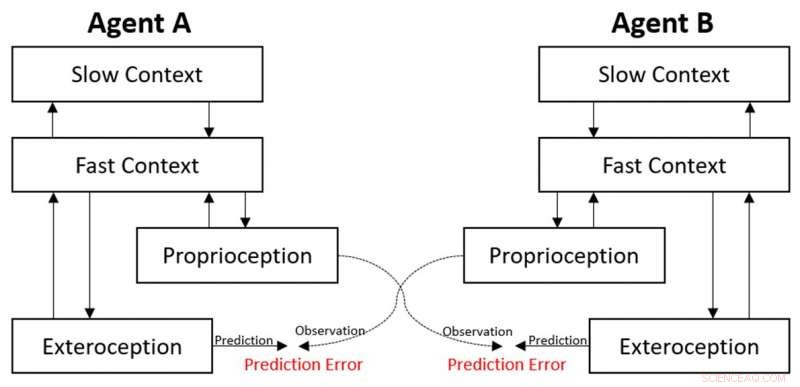
Modellen udviklet af forskerne. Kredit:Hwang, Wirkuttis &Tani.
Forskere ved Okinawa Institut for Videnskab og Teknologi har for nylig foreslået en neurorobotics-tilgang, der kan hjælpe med udviklingen af robotter med avancerede kommunikationsevner. Deres tilgang, præsenteret i et papir, der er forududgivet på arXiv, er baseret på to nøgletræk:stokastisk neural dynamik og prædiktionsfejlminimering (PEM).
"Vores forskning fokuserer bredt på at bygge robotter baseret på hjernens nøgleprincipper, "Jungsik Hwang, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "I dette studie, vi fokuserede på PEM-princippet (prediction error minimization). Hovedideen er, at hjernen er en forudsigelsesmaskine, lave forudsigelser konsekvent og minimere forudsigelsesfejl, når en forudsigelse adskiller sig fra observationer. Denne teori er blevet brugt bredt til at forklare mange aspekter af kognitiv adfærd. I dette studie, vi forsøgte at undersøge, om dette princip kan anvendes på en social situation."
I de seneste år, forskere har udført adskillige undersøgelser med det formål kunstigt at genskabe mange dyrs medfødte kommunikationsevner, inklusive mennesker. Mens mange af disse undersøgelser har opnået lovende resultater, de fleste eksisterende løsninger opnår ikke menneskelig sammenlignelig nøjagtighed.
"En af de udfordrende opgaver for en robot med kommunikationsevner er at erkende en andens hensigt bag observeret adfærd, " Hwang forklarede. "En almindelig tilgang til at løse dette problem er at betragte det som en klassifikationsopgave. Målet bliver så at opnå den korrekte etiket (brugerintention) med givet observation (brugeradfærd) ved hjælp af klassificeringsorganet. Disse dage, det populære valg for sådanne klassifikatorer er dybe neurale netværksmodeller, såsom konvolutionelle neurale netværk (CNN'er) og langtidshukommelse (LSTM)."

Kredit:Hwang, Wirkuttis &Tani.
I deres undersøgelse, Hwang og hans kolleger foreslog en anden tilgang til løsning af dette problem baseret på stokastisk neural dynamik og PEM. Forskerne anvendte deres tilgang til to små humanoide robotter, kaldet ROBOTIS OP2, og testede det i forskellige situationer, der involverede menneske-robot og robot-robot interaktioner.
"Ved at bruge vores tilgang, robotten giver konsekvent forudsigelser om adfærden hos den agent, den interagerer med, " sagde Hwang. "Når en forudsigelse er forskellig fra deres observation, robotten opdaterer sin tro, så den korrekte forudsigelse kan foretages (dvs. minimere forudsigelsesfejl). Derfor, i denne tilgang er intentionsgenkendelse ikke en klassifikationsopgave, men en aktiv proces, der involverer opdatering af 'beliefs' for at forstå, hvad der er sket i den seneste tid. Med hensyn til maskinlæring, dette kan betragtes som en slags online læring."
I foreløbige evalueringer ved hjælp af humanoide robotter, forskerne fandt ud af, at det at være i stand til at forudsige andres adfærd og minimere forudsigelsesfejl spillede en nøglerolle i sociale situationer. Ved at bruge deres tilgang, robotterne var i stand til at efterligne handlingerne af de agenter, de interagerede med; en menneskelig bruger i HRI-indstillinger (human-robot interaction) og en anden robot i RRI-indstillinger (robot-robot interaction). Da deres tilgang ikke blev anvendt på robotterne, på den anden side, robotternes interaktion med andre agenter var præget af verdslige mønstre og gentagne adfærd.

Kredit:Hwang, Wirkuttis &Tani.
"Ved hjælp af PEM-mekanismen, robotten kan ikke kun hurtigt tilpasse sig et foranderligt miljø, men også forudsige, hvad der kommer til at ske i fremtiden, " Hwang forklarede. "Denne metode kan således anvendes på andre omgivende efterretningstjenester, hvor AI konsekvent laver forudsigelser om brugere og tilpasser sig dem, eller endda proaktivt giver forslag baseret på tidligere observationer."
I fremtiden, den tilgang, der er udviklet af Hwang og hans kolleger, kunne være med til at udvikle robotter med bedre kommunikationsevner. Interessant nok, forskerne observerede også, at når to robotter interagerede med hinanden ved hjælp af deres tilgang, nogle nye og usædvanlige kommunikationsmønstre dukkede op, tyder på, at deres tilgang muliggør en mere avanceret form for kommunikation.
"Der er stadig mange interessante forskningsretninger, der kan udforskes i disse omgivelser, " sagde Hwang. "For eksempel, Jeg er interesseret i at have en gestural Turing-test, hvor en bruger interagerer med en robot, som kan styres af en anden person bag væggen eller AI. Hvis man ikke kan identificere, hvem der betjener robotten, kan vi sige, at robotten har intelligensen til at interagere med mennesker? Hvilken slags hjernes principper ville være afgørende for at illustrere menneskelignelse i sådanne sociale omgivelser? Det er nogle spørgsmål, som jeg gerne vil udforske i fremtiden."
© 2019 Science X Network
Sidste artikelTesla undersøger bilbrand i Shanghai
Næste artikelUber vinder $1 mia investering fra Toyota, SoftBank fond
 Varme artikler
Varme artikler
-
 Kinas Huawei ser et opsving i overskuddet på trods af amerikanske tilbageslagHuawei sagde, at det dragede fordel af et stærkt smartphonesalg i 2017, trods hård konkurrence i Kina og andre steder Den kinesiske telekomgigant Huawei oplevede et stigning i overskuddet i 2017,
Kinas Huawei ser et opsving i overskuddet på trods af amerikanske tilbageslagHuawei sagde, at det dragede fordel af et stærkt smartphonesalg i 2017, trods hård konkurrence i Kina og andre steder Den kinesiske telekomgigant Huawei oplevede et stigning i overskuddet i 2017, -
 Forskere bruger maskinlæring til at analysere filmpræferencerKredit:arXiv:1807.02221 [cs.CL] Kunne adfærdsøkonomi og maskinlæring bidrage til bedre at forstå forbrugernes filmpræferencer? Et team af forskere fra University of Cambridge, University of West E
Forskere bruger maskinlæring til at analysere filmpræferencerKredit:arXiv:1807.02221 [cs.CL] Kunne adfærdsøkonomi og maskinlæring bidrage til bedre at forstå forbrugernes filmpræferencer? Et team af forskere fra University of Cambridge, University of West E -
 UPS sporer oksekødsforsendelser fra gård til bord med ny teknologiKredit:CC0 Public Domain UPS demonstrerede blockchain-verificeret sporing af en forsendelse af Black Angus oksekød fra Kansas til bordet i et japansk steakhouse i sidste uge. Fragtfirmaet sagde,
UPS sporer oksekødsforsendelser fra gård til bord med ny teknologiKredit:CC0 Public Domain UPS demonstrerede blockchain-verificeret sporing af en forsendelse af Black Angus oksekød fra Kansas til bordet i et japansk steakhouse i sidste uge. Fragtfirmaet sagde, -
 AD-EYE:En co-simuleringsplatform til at verificere funktionelle sikkerhedskoncepter (FSC'er) i selvk…Figur, der opsummerer nogle af værktøjerne til simulering af automatiseret kørsel. Kredit:Xinhai Zhang. I løbet af de sidste par år, et stigende antal forskere og virksomheder verden over har udvi
AD-EYE:En co-simuleringsplatform til at verificere funktionelle sikkerhedskoncepter (FSC'er) i selvk…Figur, der opsummerer nogle af værktøjerne til simulering af automatiseret kørsel. Kredit:Xinhai Zhang. I løbet af de sidste par år, et stigende antal forskere og virksomheder verden over har udvi
- Sådan beregnes Wobbe Index
- Frihandel kan forhindre sult forårsaget af klimaændringer
- Hvordan fremstilles rekombinant DNA?
- At sætte Aotearoa på kortet:New Zealand har skiftet navn før, hvorfor ikke igen?
- Lovende lægemiddelkandidater til prostatacancer identificeret
- Lyst til at tilmelde dig rumturisme? Her er 6 ting at overveje (udover prisskiltet)