


Stanford Doggo:en meget smidig firdobbelt robot
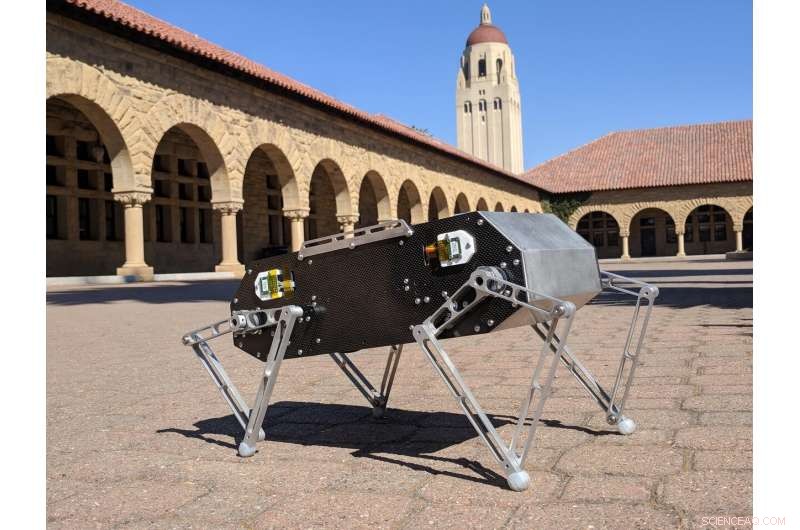
Stanford Doggo. Kredit:Kau et al.
Forskere ved Stanford University har for nylig skabt en open-source quadruped robot kaldet Stanford Doggo. Deres robot, præsenteret i et papir, der er forhåndspubliceret på arXiv og skal offentliggøres af IEEE Udforsk , overgår ydeevnen for mange state-of-the-art benede robotter i lodret springbehændighed.
"For cirka halvandet år siden, Jeg startede Extreme Mobility-underholdet på Stanford Student Robotics, "Nathan Kau, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Vi var interesserede i at bygge smidige robotter, der kunne udforske miljøer, hvor hjul eller flyvende køretøjer ikke ville være effektive. Der findes allerede et par virkelig fantastiske robotter, der kan fungere i denne type miljøer, men de var ret dyre, brugerdefinerede designs, som vi ikke ville være i stand til at replikere. Så sidste år, vi satte os for at designe og prototype en billig firbenet robot inspireret af disse grupper, og Stanford Doggo er resultatet af vores indsats. "
Robotten udviklet af Kau og hans kolleger har fire ben, som hver især drives af to motorer. Bælte drev forbinder motorerne til akslerne på benforbindelserne, hvilket får ledene til at rotere med en tredjedel af motorernes hastighed. Denne hastighedsreduktion tredobler næsten momentet, og forholdet er lavt nok til at sikre, at kræfter fra miljøet registreres af motoren.
"Denne effekt ligner at cykle med lavt gear, og det er lettere at mærke stød på vejen i dine fødder, end det er i et højt gear, "Kau forklarede." Den slags mekanismer, kaldet kvasi-direkte drivaktuatorer, er noget almindelige nu i benede robotter. Imidlertid, vi fandt ud af, at få, hvis nogen grupper brugte denne type aktuator på mindre, billige gangrobotter. "
Stanford Doggo er en meget smidig og billig robot, der let kan replikeres. Bemærkelsesværdigt, robotten har sat en ny rekord for lodret springethed blandt enhver robot eller et dyr, fordobling af springhøjden for tidligere firdobbelte robotter. Stanford Doggo er også langt billigere end andre benede robotter, som typisk koster titusinder eller hundredtusinder af dollars.
"I alt, Stanford Doggo koster omkring $ 3000 USD at bygge, inklusive alle de fremstillingsomkostninger, du vil afholde, hvis du ikke har dyre værktøjsmaskiner såsom møller eller drejebænke, "Sagde Kau." Den lave pris betyder, at robotten er mere tilgængelig for andre, især hvis de ikke er på et universitetslaboratorium. Dens vigtigste funktion, imidlertid, er, at den kører på open-source hardware og software, og at vi har frigivet detaljerede planer, delelister og instruktioner. "
I en række evalueringer foretaget af Kau og hans kolleger, Stanford udkonkurrerede andre quadruped robotter med en betydelig margin. Dens lodrette springbehændighed, et mål for den gennemsnitlige lodrette hastighed, matchede den for det mest smidige dyr og overgik den for den bedst udførte benede robot med 22 procent. Flere andre interessante robotter udvikles i øjeblikket, så snart kan Stanford Doggos titler ændre sig. Ikke desto mindre, dens lodrette springbehændighed forbliver yderst bemærkelsesværdig.
"Vi håber, at flere og flere laboratorier vil kunne teste nye kontrolteknikker ved hjælp af vores robot som platform, "Sagde Kau." Vi tror, at hvis flere mennesker arbejder på denne type robotter, de bliver hurtigere klar til virkelige applikationer såsom levering af kritiske forsyninger eller søgning og redning. Vi håber også, at vores robot vil inspirere eleverne til at begynde at udforske området robotben. Det er generelt et dyrt område inden for robotik at arbejde i, så vi håber, at Stanford Doggo vil sænke adgangsbarrieren. "
Kau og hans kolleger er lykkedes med at udvikle den allerførste billige og meget smidige firdobbede robot designet til forskningsapplikationer. Stanford Doggo er helt open-source og er bygget med meget få brugerdefinerede dele, dermed kan det let genskabes. Forskerne håber, at andre robotteknikker vil bygge på og forbedre deres robot, videreføre deres forskning.
Kau og hans kolleger arbejder også på en større version af Stanford Doggo, kaldet Stanford Woofer. Stanford Woofer er omtrent dobbelt så stor som Doggo og kan bære omkring 6 kg ekstra udstyr, såsom sensorer og en robotarm.
"Stanford Doggo er stadig meget et igangværende projekt, "Kau tilføjet." F.eks. vi arbejder på at integrere en komplet pakke sensorer på robotten inklusive LIDAR. Et andet delprojekt får robotten til at se lidt mindre bar og mere tilgængelig ud, især da vi tror, at dette kunne være en effektiv platform for uddannelse og opsøgende arbejde. Vi skriver også en omfattende Instructable som supplement til vores eksisterende open source -materialer, som giver trin-for-trin instruktioner om, hvordan du bygger din egen Stanford Doggo. "
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Undersøgelse identificerer forskellige grupper, der er interesseret i typer elbilerPlug-in hybridbiler oplades i San Francisco i 2009. Kredit:Felix Kramer via Creative Commons på Flickr Chauffører, der overvejer plug-in hybridbiler med benzinbackup, er mest interesserede i økono
Undersøgelse identificerer forskellige grupper, der er interesseret i typer elbilerPlug-in hybridbiler oplades i San Francisco i 2009. Kredit:Felix Kramer via Creative Commons på Flickr Chauffører, der overvejer plug-in hybridbiler med benzinbackup, er mest interesserede i økono -
 Hjemmeartikler bliver smartere og uhyggeligere, kan lide det eller ejTo forskellige størrelser af HiMirror bruger sin hudanalyse -teknologi, at vurdere din hud for rynker, fine linjer, mørke cirkler, mørke pletter, røde pletter, ruhed, og porer, vist her på CES Unveile
Hjemmeartikler bliver smartere og uhyggeligere, kan lide det eller ejTo forskellige størrelser af HiMirror bruger sin hudanalyse -teknologi, at vurdere din hud for rynker, fine linjer, mørke cirkler, mørke pletter, røde pletter, ruhed, og porer, vist her på CES Unveile -
 USA anklager Facebook for højteknologisk boligdiskriminationI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Facebook blev anklaget for diskrimination af det amerikanske departement for bolig- og byudvikling på grund af dets an
USA anklager Facebook for højteknologisk boligdiskriminationI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Facebook blev anklaget for diskrimination af det amerikanske departement for bolig- og byudvikling på grund af dets an -
 Toyotas nettoresultat i første kvartal steg næsten 4 pct. helårsresultat nedjusteretToyota sagde, at dets driftsresultat steg med 8,7 procent til 742 milliarder yen Den japanske bilgigant Toyota sagde fredag, at dets nettooverskud i første kvartal steg takket være solidt salg og
Toyotas nettoresultat i første kvartal steg næsten 4 pct. helårsresultat nedjusteretToyota sagde, at dets driftsresultat steg med 8,7 procent til 742 milliarder yen Den japanske bilgigant Toyota sagde fredag, at dets nettooverskud i første kvartal steg takket være solidt salg og
- Papirhøjdepunkt:Nanoskopisk mønstrede materialer med indstillelige dimensioner
- Tysk politi anholder Porsche-manager for dieselskandale
- Kræftforbundet enzymmekanisme, der er nyligt karakteriseret i undersøgelse
- Studiet undersøger, hvordan partner- og rivaliserende strategier kan fremme eller ødelægge samarb…
- Forskere tilbyder designer store atomer efter behov
- Palæontologer opdager nye arter af sauropoddinosaurer i Tanzania