


Robotter rykker op for at nå de store dårlige askeblokke
Godt, hver efter sin smag. Killinger, der bliver venner med garnnøgler, er absolutte magneter for videosurfere, men en rivaliserende hær af videoklikstere kan aldrig maksimere ud af at stirre på humanoider, der navigerer, hvor de vil hen.
Den seneste video, der viser humanoide robotter på farten, imponerer seerne med den behændige og succesrige måde, de navigerer i en askebloklabyrint på.
Videoen om sidstnævnte er IHMC, Instituttet for menneskelig og maskinel kognition (IHMC).
"At gå gennem et rodet og kompliceret miljø, " sagde holdet, benede robotter skal finde ud af, hvor de kan sætte deres fødder. Tilføjet udfordring:Dette skal gøres hurtigt, om terrænet er fladt eller komplekst.
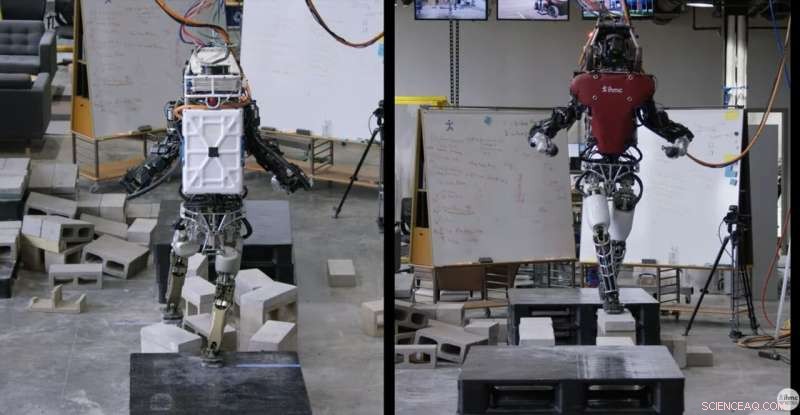
IHMC's autonome fodtrinsplanlægningsprogram er på arbejde på både Boston Dynamics' robot, og NASA-udviklede Valkyrie.
Holdet brugte de to robotter, Atlas (Boston Dynamics) og Valkyrie (NASA Johnson Space Center) for den seneste udstilling. En anden nøglefunktion var dens 'hoved'.
"Metoden bruger maskinens sensorer til at finde den mest effektive vej til et menneskevalgt sted, " sagde TNW.
"I denne video, "fortælleren sagde, "vi bruger Carnegie Robotics MultiSense SL-hovedet til at generere punktsky af miljøet. Ved at segmentere denne punktsky i plane områder, vi repræsenterer den enorme mængde data, der kommer fra perceptionssensorerne i en meget mere kompakt form."
De dekomponerede yderligere disse plane områder til en samling af polygoner. Engadget :"Hver sektion fortolkes derefter til en række polygoner for at skabe en model af miljøet, så robotten kan planlægge hvert af sine trin for at komme fra sit udgangspunkt til sit mål."
IHMC-teamet, under DARPA-udfordringen, havde tidligere brugt Atlas-robotten. En operatør instruerede Atlas. Der blev placeret fodtrin i grænsefladen. Processen var langsom og lagde en byrde på operatøren. En anden ulempe var, at deres placering af individuelle fodtrin var udsat for fejl. Atlas faldt på den første dag af finalekonkurrencen.
Denne gang, at omgå menneskelige fejl, det nye system lader en operatør vælge den ønskede placering, sagde TNW , "men i sidste ende er afhængig af en algoritme til at finde ud af, hvordan man får robotten dertil og undgår forhindringer."
"I bund og grund, IHMC styrer disse komplekse navigationsoperationer ved at angive et begyndelses- og slutpunkt for robotten, " sagde Darrell Etherington ind TechCrunch , "og derefter kortlægge alle mulige stier trin for trin, evaluere omkostningerne ved hver enkelt og i sidste ende nå frem til den bedst mulige vej - hvilket alt sammen kan ske relativt hurtigt på moderne hardware."
I en videoscene af test viser det, hvordan holdet får robotten til at gå hen over et sæt slaggblokke, hvor der kun er få fodfæste der er mulige. De kan også planlægge stier, hvor robotten ikke har andet valg end kun at bruge delvist fodfæste.
I øjeblikket, sagde de i deres videonoter, smalt terræn har en succesrate på omkring 50 procent, ujævnt terræn er omkring 90 procent, der henviser til, at fladt terræn er tæt på 100 procent.
Pittsburgh, Pennsylvania-baserede Carnegie Robotics, i mellemtiden, er en udbyder af avancerede robotteknologiske sensorer og platforme. Den originale MultiSense SL havde været den foretrukne sensor for Atlas humanoide robotter i DARPA Robotics Challenge (DRC). Som det humanoide hoved, SL leverede størstedelen af perceptuelle data, der blev brugt til teleoperation samt automatiseret kontrol.
Hvad er det næste?
"Vi planlægger at øge planlæggerens hastighed og evnen til at planlægge gennem labyrinter og til usete mål, " sagde de i videonoterne.
Det er tydeligt, at holdet fortsætter forsøgene på at erobre tobenet gang.
IHMC-holdet sagde det samme.
"Vores humanoide projekter er fokuseret på at skubbe vores bipedale humanoids-kapaciteter fremad til at håndtere ujævnt terræn uden viden om miljøet fra sensorer ombord...Vi fokuserer også på evnen til robust at håndtere eksterne forstyrrelser. Vores mål er at tackle stadigt sværere gående udfordringer."
Videoen og papiret blev indsendt til Humanoids 2019 - International Conference on Humanoid Robots begivenhed, der finder sted senere i år.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Hvad får et pædagogisk videospil til at fungere godt?Resonant Games udgives af MIT Press. Forfatterne (øverst til venstre, med uret):Jason Haas, Erik Klopfer, Scot Osterweil, og Louisa Rosenbeck. Kredit:Massachusetts Institute of Technology For at f
Hvad får et pædagogisk videospil til at fungere godt?Resonant Games udgives af MIT Press. Forfatterne (øverst til venstre, med uret):Jason Haas, Erik Klopfer, Scot Osterweil, og Louisa Rosenbeck. Kredit:Massachusetts Institute of Technology For at f -
 Du er produktet:Facebooks forretningsmodel forklaretForetrækker du økologisk mad? Studerede du i Mexico? Kan du lide røde sko? Sådanne stykker information om Facebook-brugere kan isoleret set virke ubetydelige, men en gang høstet i stor skala, gøre int
Du er produktet:Facebooks forretningsmodel forklaretForetrækker du økologisk mad? Studerede du i Mexico? Kan du lide røde sko? Sådanne stykker information om Facebook-brugere kan isoleret set virke ubetydelige, men en gang høstet i stor skala, gøre int -
 Saudi hackathon søger højteknologiske løsninger på hajj-katastroferDeltagerne konkurrerer i Saudi-Arabiens første hackathon nogensinde den 1. august, 2018 forud for årets hajj-pilgrimsfærd drevet af koffein, pizza og adrenalin, Søvnberøvede programmører i en saud
Saudi hackathon søger højteknologiske løsninger på hajj-katastroferDeltagerne konkurrerer i Saudi-Arabiens første hackathon nogensinde den 1. august, 2018 forud for årets hajj-pilgrimsfærd drevet af koffein, pizza og adrenalin, Søvnberøvede programmører i en saud -
 GPS -vejledning kan narres, så forskere kæmper for at finde backupteknologierKredit:CC0 Public Domain Fem år siden, et team af forskere fra University of Texas i Austin gik ombord på en yacht på 80 millioner dollars med det formål at forsøge at narre fartøjets navigationss
GPS -vejledning kan narres, så forskere kæmper for at finde backupteknologierKredit:CC0 Public Domain Fem år siden, et team af forskere fra University of Texas i Austin gik ombord på en yacht på 80 millioner dollars med det formål at forsøge at narre fartøjets navigationss
- Kunne et atmosfærisk sprøjteprogram mod global opvarmning virkelig fungere?
- Nyt landdækningsatlas afslører, at kun 6 procent af Storbritannien er udviklet
- Maya mere krigerisk end hidtil antaget
- Nanoelektronik er nøglen til fremskridt inden for vedvarende energi
- Paris bagatelliserer Notre-Dame, der fører til forgiftningsangst
- Mars-roveren Curiosity laver den første tyngdekraftsmålende travers på den røde planet