


Rejs dig op og gå bots kommer tættere på, siger undersøgelse

Denne robotform og komplekse sensorer er resultatet af et enkelt print. Sensorerne kan mærke belastning og tryk. Kredit:David Baillot/University of California San Diego
Robotforskere ved University of California San Diego har for første gang brugt en kommerciel 3-D-printer til at indlejre komplekse sensorer i robotlemmer og gribere. Men de fandt ud af, at materialer, der er kommercielt tilgængelige til 3-D-print, stadig skal forbedres, før robotterne kan være fuldt funktionsdygtige.
Forskere, der specialiserer sig i 3-D-print, har længe søgt at lave en hel robot i ét print - en maskine, der ville være i stand til at gå selv væk fra printeren, når den er færdig. Dette ville gøre det nemmere at printe flere robotter hurtigere. Det ville også gøre det muligt at 3-D printe robotter uden menneskelig opsyn, for eksempel på månen eller Mars.
En af hovedspærringerne på vejen mod dette mål er udviklingen af effektive sensorer til bløde robotter. Det er fordi blødt, fleksible robotter har ofte komplekse overflader og bevægelser, som er svære at udstyre og dække med sensorer lavet med traditionelle fremstillingsteknikker. Disse typer robotter er mere fleksible end deres stive fætre og kan sikkert arbejde side om side med mennesker.
UC San Diego-forskernes indsigt var dobbelt. De henvendte sig til en kommercielt tilgængelig printer til opgaven, (Stratsys Objet350 Connex3 - en arbejdshest i mange robotlaboratorier). Ud over, de indså, at et af materialerne, der bruges af 3-D-printeren, er lavet af kulstofpartikler, der kan lede strøm til sensorer, når de er tilsluttet en strømkilde. Så robotister brugte den sorte harpiks til at fremstille komplekse sensorer indlejret i robotdele lavet af klar polymer. De designede og fremstillede adskillige prototyper, inklusive en griber.
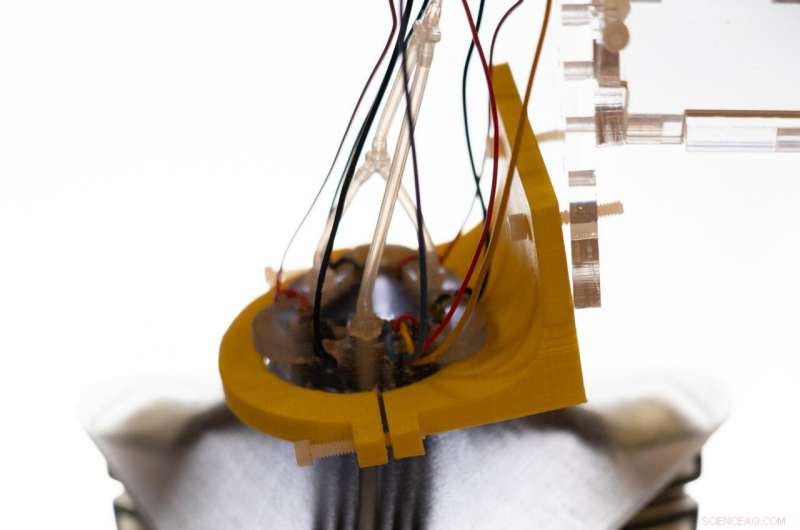
Denne griber blev fremstillet på en kommerciel, multimateriale 3D-printer, der printer aktuatorer og sensorer sammen. Kredit:David Baillot/University of California San Diego
Når det strækkes, sensorerne svigtede ved omtrent samme belastning som menneskelig hud. Men de polymerer, som 3-D-printeren bruger, er ikke designet til at lede elektricitet, så deres ydeevne er ikke optimal. De 3-D printede robotter kræver også en del efterbehandling, før de kan være funktionelle, herunder omhyggelig vask for at rense urenheder og tørring.
Imidlertid, forskere er fortsat optimistiske over, at i fremtiden, materialer vil forbedre og gøre 3-D-printede robotter udstyret med indlejrede sensorer meget nemmere at fremstille.
"Embedded printing af sensorer er en kraftfuld proces, der kunne muliggøre og forbedre problemfri integration af sensorer i bløde robotter, men der findes endnu ikke en passende, kommercielt tilgængelig, brugervenlig platform, der giver brugerne mulighed for samtidigt at printe bløde aktuatorer og sensorer, " skriver forskere.
 Varme artikler
Varme artikler
-
 Er Zoom klar til at det meste af Amerika kan arbejde online?Kredit:CC0 Public Domain Coronavirus sætter fjernarbejde på prøve. Virksomheder på tværs af sektorer implementerer politikker, der tilskynder medarbejdere til at arbejde hjemmefra, efterhånden so
Er Zoom klar til at det meste af Amerika kan arbejde online?Kredit:CC0 Public Domain Coronavirus sætter fjernarbejde på prøve. Virksomheder på tværs af sektorer implementerer politikker, der tilskynder medarbejdere til at arbejde hjemmefra, efterhånden so -
 GymCam sporer øvelser, som bærbare skærme ikke kanForskere ved Carnegie Mellon University har udviklet et visionsbaseret system til overvågning af træningsøvelser. De testede det i et travlt gymnasium på universitetet, demonstrerer, at systemet samti
GymCam sporer øvelser, som bærbare skærme ikke kanForskere ved Carnegie Mellon University har udviklet et visionsbaseret system til overvågning af træningsøvelser. De testede det i et travlt gymnasium på universitetet, demonstrerer, at systemet samti -
 En ny defensiv teknik kunne afholde angribere ved at gøre software buggiereForenklet angriber-arbejdsgang. Angribere finder fejl, triage dem for at bestemme udnyttelsesevne, derefter udvikle udnyttelser og implementere dem til deres mål. Kreditering:Hu, Hu &Dolan-Gavitt.
En ny defensiv teknik kunne afholde angribere ved at gøre software buggiereForenklet angriber-arbejdsgang. Angribere finder fejl, triage dem for at bestemme udnyttelsesevne, derefter udvikle udnyttelser og implementere dem til deres mål. Kreditering:Hu, Hu &Dolan-Gavitt. -
 Læs dette før du installerer udvidelser til din webbrowserKredit:CC0 Public Domain Da Amazon for nylig tilbød at betale Prime-medlemmer $10 for at downloade sin Assistant-browserudvidelse, Jeremy Tillman, der kører den ad-blokerende software Ghostery, la
Læs dette før du installerer udvidelser til din webbrowserKredit:CC0 Public Domain Da Amazon for nylig tilbød at betale Prime-medlemmer $10 for at downloade sin Assistant-browserudvidelse, Jeremy Tillman, der kører den ad-blokerende software Ghostery, la
- Semantisk cache til AI-aktiveret billedanalyse
- Hvad sker der, efter at du har sat en gulerod i saltvand?
- Sinclair sælger 7 tv-stationer til Fox for at vinde regulatorisk OK
- Håndholdt gadget til hurtig test af fødevarekvalitet
- Indikatorer peger mod værre oversvømmelser af Store Søer end i 2017
- Forskere udvikler teknik til at integrere III-V materialer på siliciumskiver