


Turing-test for androider vil bedømme, hvor naturtro humanoide robotter kan være
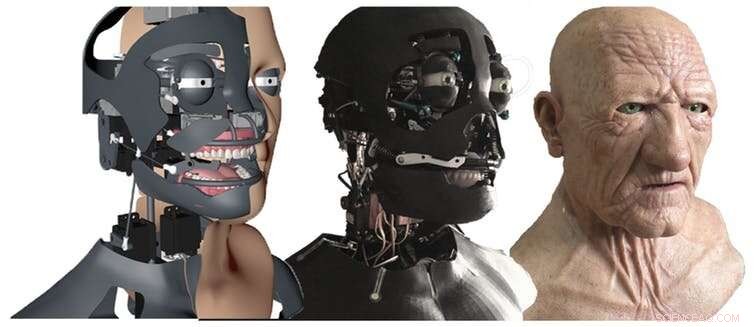
Testen nedbryder robotbyggeprocessen. Kredit:Carl Strathearn, Forfatter angivet
Alan Turing blev for nylig annonceret som ansigtet på den nye £50-seddel for hans kodebrydende bidrag i Anden Verdenskrig og lægger grundlaget for datalogi. Imidlertid, Turings arbejde udfordrer og inspirerer stadig mange mennesker, der arbejder i dag, især dem inden for robotteknologi og kunstig intelligens.
I 1950 spurgte han, "Kan maskiner tænke?", og kom med en test, som forskerne stadig bruger som en måde at bedømme, om en computer kunne betragtes som virkelig intelligent på samme måde som mennesker. Men, kommer fra en alder, hvor autonome robotter kun lige var i deres barndom, Turing-testen var kun designet til at vurdere kunstige hjerner, ikke en fuldstændig kunstig person.
Nu hvor vi har stadig mere realistisk udseende androider, vi har brug for en version af det 21. århundrede af testen. Mine kolleger og jeg har designet en "Multimodal Turing Test" for at bedømme maskinens udseende, bevægelse, stemme og det, vi kalder legemliggjort kunstig intelligens (EAI). Dette er et mål for, hvor godt kunstig intelligens er integreret med en robotkrop for at udtrykke en personlighed.
Det betyder, at vi systematisk kan sammenligne en humanoid robot med en levende modstykke. På denne måde vi kan stille spørgsmålet:"Kan vi bygge robotter, der perceptuelt ikke kan skelnes fra mennesker?"
Turing hævdede, at hvis et edb-program kunne bedrage mere end 30% af mennesker til at tro, at det var følsomt under virkelige forhold, så er det effektivt ikke at skelne fra det menneskelige sind - det kan tænke. En computer var i stand til at bestå denne test i 2014. Det betyder ikke, at der ikke er noget arbejde at gøre for at skabe ægte kunstig intelligens. Langt fra. Men Turing -testen giver os et benchmark for at bedømme vores fremskridt.
Mange forskere mener, at skabelsen af en humanoid robot, der ikke kan skelnes fra et rigtigt menneske, er robotteknologiens ultimative mål. Alligevel er der i øjeblikket ingen standard måde at evaluere, hvor naturtro androider er, så det er umuligt at benchmarke denne udvikling.
Ligesom Turing, vi argumenterer ikke for, at en robot forvandler sig til et organisk væsen, når den kan replikere et menneskes forhold. Men hvis en robot dukker op, opfører sig og fungerer på en måde, der ikke kan skelnes fra et menneske under virkelige forhold, så kan det reelt opfattes som det samme som et menneske.

Går for menneske? Kredit:Carl Strathearn, Forfatter angivet
En af de største udfordringer for naturtro robotbyggere er at overvinde det, der er kendt som den "uhyggelige dal". Dette refererer til et udviklingsstadium, hvor robotter kommer tættere på menneskers udseende, men faktisk er mere afskrækkende for folk, fordi de ikke har helt ret. Problemet er, at konventionelle metoder til at vurdere problemet ikke er nuancerede nok til at afgøre præcis, hvorfor en robot gør folk utilpas.
Disse tilgange har en tendens til at sammenligne robotten som helhed med et menneske, i stedet for at opdele det i dets komponentfunktioner. For eksempel, en lille fejlberegning i øjets bevægelse af en ellers realistisk udseende robot kan give hele spillet væk. Højkvalitetsegenskaber i andre ansigtsområder bliver derefter en del af den fejl.
Vores idé er at evaluere hvert område trin for trin. Så længe hver funktion er designet til at se ud som om den er en del af den samme krop (samme køn, alder og så videre), så hvis et øje og mund individuelt kan bestå testen, så skal de også bestå den sammen. Dette ville give en robotbygger mulighed for at vurdere fremskridt, mens de går for at sikre, at hver kropsdel ikke kan skelnes fra en menneskelig og for at forhindre, at de ender med noget, der falder ned i den uhyggelige dal.
Vores test er også organiseret i fire faser, hver vanskeligere end den sidste, repræsenterer, hvad vi kalder "hierarki af menneskelig emulering." Først, robotten skal simpelthen se virkelig ud, når den stadig er. Sekund, den skal bevæge sig på en naturlig måde. Tredje, den skal producere en realistisk simulering af fysisk tale i både udseende og måden den bevæger sig på.
Endelig kommer testen af legemliggjort kunstig intelligens, vurdere, om robotten kan reagere på verden ved realistisk at udtrykke følelser, så den kan interagere naturligt med mennesker. Hvis en humanoid robot samtidigt kan bestå alle fire niveauer af testen, så er det perceptuelt ikke til at skelne fra mennesker.
"Vi kan kun se en kort afstand forude, men vi kan se en masse der, der skal gøres." Denne udtalelse er lige så nøjagtig i dag som den dag, Turing sagde det i 1950. Men, robotingeniører er tættere end nogensinde før på at nå deres mål om en realistisk menneskelignende maskine, og 2017 var vidne til indvielsen af verdens første robotborger.
I dag, vi har værktøjerne til at udvikle humanoide robotter med et stadig mere naturtro udseende, bevægelse, tale og EAI. Men vores Multimodal Turing Test giver ingeniører en tilgængelig måde at evaluere og dermed forbedre deres arbejde.
Som med Turings originale test, vores tilgang rejser spørgsmål om, hvad det vil sige at være en person, når vi ikke længere kan kende forskel på et rigtigt menneske og et kunstigt. At forsøge at besvare disse spørgsmål for tidligt, fordi vi ønsker at komme hurtigere frem, end vi faktisk er, kan føre til fejl, såsom at give juridiske rettigheder til en maskine, der ikke er i nærheden af naturtro. Men jo mere vi udvikler humanoide robotter, jo mere lærer vi om vores værdier og endda vores følelser.
Denne artikel er genudgivet fra The Conversation under en Creative Commons-licens. Læs den originale artikel. 
Sidste artikelSpørgsmål og svar:Hvad skal du vide om Capital One-databruddet
Næste artikelRaketbrændstof og 3-D-print
 Varme artikler
Varme artikler
-
 FAAs tætte bånd til Boeing afhørt efter 2 dødbringende styrtDenne fredag, 19 juni, 2015 filbillede viser Department of Transportation Federal Aviation Administration bygning, i Washington. I mere end seks årtier, Federal Aviation Administration har påberåbt si
FAAs tætte bånd til Boeing afhørt efter 2 dødbringende styrtDenne fredag, 19 juni, 2015 filbillede viser Department of Transportation Federal Aviation Administration bygning, i Washington. I mere end seks årtier, Federal Aviation Administration har påberåbt si -
 YouTube sigter mod at slå ned på falske nyheder, støtte journalistikDette billede leveret af Google viser en side med lokale nyheder i den gratis YouTube-app til tv-skærme. Googles YouTube siger, at det tager flere skridt for at sikre rigtigheden af nyheder om sin t
YouTube sigter mod at slå ned på falske nyheder, støtte journalistikDette billede leveret af Google viser en side med lokale nyheder i den gratis YouTube-app til tv-skærme. Googles YouTube siger, at det tager flere skridt for at sikre rigtigheden af nyheder om sin t -
 Nevada overvejer teknologi til at scanne mobiltelefoner efter nedbrudI denne 10. maj, 2017 filbillede, Ben Lieberman poserer til et billede i sit hjem i Chappaqua, N.Y. Lieberman, hvis 19-årige søn døde i en ulykke, der involverede distraheret kørsel, opfordrer til stø
Nevada overvejer teknologi til at scanne mobiltelefoner efter nedbrudI denne 10. maj, 2017 filbillede, Ben Lieberman poserer til et billede i sit hjem i Chappaqua, N.Y. Lieberman, hvis 19-årige søn døde i en ulykke, der involverede distraheret kørsel, opfordrer til stø -
 Brug af tegn og handlinger til at hjælpe folk med at komme sammen med kunstig intelligensAt lære, hvordan mennesker interagerer med AI, er et vigtigt skridt i at integrere maskiner i samfundet på fordelagtige måder. Kredit:Pixabay At lære, hvordan mennesker interagerer med maskiner me
Brug af tegn og handlinger til at hjælpe folk med at komme sammen med kunstig intelligensAt lære, hvordan mennesker interagerer med AI, er et vigtigt skridt i at integrere maskiner i samfundet på fordelagtige måder. Kredit:Pixabay At lære, hvordan mennesker interagerer med maskiner me