


Skurrende kakerlakker hjælper forskere med stabile svimlende robotter

Robotten, der blev brugt i dette eksperiment, var en maskine fra Minitaur -mærket med ben. Kredit:Georgia Tech / Neveln
Øv, en kakerlak! Men den lyner af, før swatteren dukker op. Nu, forskere har udnyttet fejlens suveræne hastighedsfærdigheder til at skabe en smart enkel metode til at vurdere og forbedre bevægelse i robotter.
Normalt, kedelig modellering af mekanik, elektronik, og informationsvidenskab er påkrævet for at forstå, hvordan insekter eller roboters bevægelige dele koordinerer problemfrit for at tage dem steder. Men i en ny undersøgelse, biomekanikforskere ved Georgia Institute of Technology kogte spurterne af kakerlakker ned til praktiske principper og ligninger, de derefter brugte til at få en testrobot til at amble om bedre.
Metoden fortalte forskerne om, hvordan hvert ben fungerer alene, hvordan de alle kommer sammen som en helhed, og harmonien eller manglen derpå i, hvordan de gør det. På trods af fejl og bots fuldstændigt divergerende bevægelsesdynamik, den nye metode fungerede for både og burde fungere for andre robotter og dyr, også.
Den biologiske robot, kakerlakken, var den langt overlegne løber med neurologiske signaler, der ledte seks upåklageligt udviklede ben. Den mekaniske robot, en forbrugsmodel, havde fire stumpe ben og intet nervesystem, men stolede i stedet på bevægelseskontrol på grove fysiske kræfter, der rejste gennem chassiset som grove signaler for groft at koordinere dets klodset gangart.
"Robotten var meget større og kunne næsten ikke fornemme sit miljø. Kakerlakken havde mange sanser og kan tilpasse sig bedre til ujævnt terræn. Stød så høje som hofterne ville slet ikke bremse den, "sagde Izaak Neveln, undersøgelsens første forfatter, som var postdoktor i laboratoriet af Simon Sponberg ved Georgia Tech under undersøgelsen.
Avanceret enkelhed
Metoden, eller "måle, "som undersøgelsen kalder det, overskred disse store forskelle, som gennemsyrer dyreinspireret robotik.
"Målingen er generel (universel) i den forstand, at den kan bruges, uanset om signalerne er neurale spikemønstre, kinematik, spændinger eller kræfter og afhænger ikke af det særlige forhold mellem signalerne, "undersøgelsens forfattere skrev.
Uanset hvordan en fejl eller en bot fungerer, målingens matematiske input og output er altid i de samme enheder. Foranstaltningen eliminerer ikke altid behovet for modellering, men det står til at forkorte og guide modellering og afværge kvalmende fejltrin.
Forfatterne offentliggjorde undersøgelsen i tidsskriftet Naturkommunikation i august 2019. Forskningen blev finansieret af National Science Foundation. Sponberg er adjunkt ved Georgia Tech's School of Physics og på School of Biological Sciences.
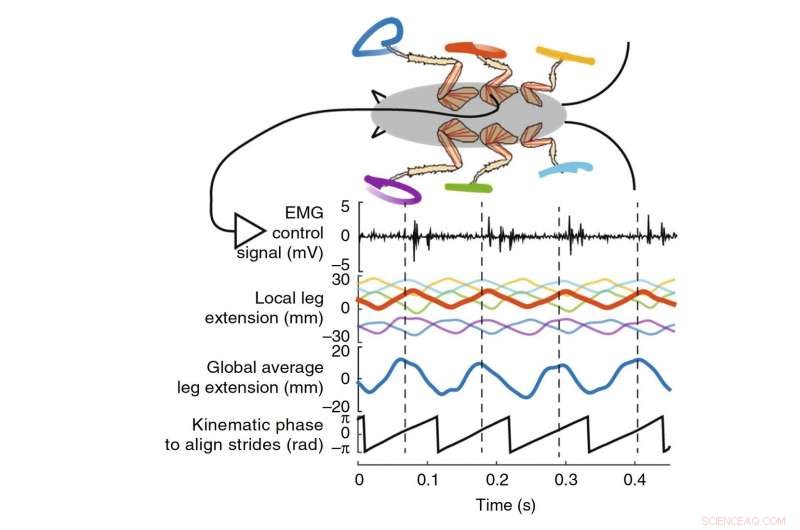
Svingningerne i kakerlakens ben kan tegnes på samme måde som et pendul svinger ind i sinusbølger. Disse fører til bedre matematisk forståelse af insektets bevægelse. Kredit:Georgia Tech / Sponberg / Neveln
Centralisering kontra decentralisering
Ofte sender en bot eller et dyr mange gangesignaler gennem et centralt system for at harmonisere bevægelse, men ikke alle signaler er centraliseret. Selv hos mennesker, selvom bevægelse stærkt afhænger af signaler fra centralnervesystemet, nogle neurale signaler er begrænset til områder af kroppen; de er lokaliserede signaler.
Nogle insekter bevæger sig tilsyneladende med lidt centralisering - f.eks. Pindefejl, også kendt som vandrestokke, hvis ben støder næsten uafhængigt. Stick bugs er wonky løbere.
"Tanken har været, at pindbugs har den mere lokaliserede kontrol over bevægelse, der henviser til, at en kakerlak går meget hurtigt og skal opretholde stabilitet, og dens bevægelseskontrol er sandsynligvis mere centraliseret, mere urlignende, "Sagde Neveln.
Stærk centralisering af signaler koordinerer generelt bevægelse bedre. Det kan være kode, der rejser gennem en omfattende robotledning, en kakerlaks centrale neuroner synkroniserer benene, eller den klodset robotchassis, der vipper væk fra et ben, der dunker i jorden og dermed lægger vægt på et modsat ben. Robotikere skal gennemskue forskellene og finde ud af samspillet mellem en lokomotors lokale og centrale signaler.
Fed fysik
Det nye "mål" gør dette ved at fokusere på et overordnet fænomen i gangbenene, som kan ses som pendula, der bevæger sig frem og tilbage. For stor bevægelse, de skal synkronisere sig i det, der kaldes fasekoblingsoscillationer.
En sjov, let eksperiment illustrerer dette fysikprincip. Hvis et par stykker, sig seks, metronomer - tikkende rytmependula, som klaverlærere bruger - svinger ud af synkronisering, og du placerer dem alle på en platform, der frit svajer sammen med metronomernes svingninger, gyngerne synkroniseres i fællesskab.
Faserne, eller retninger, af deres svingninger kobles med hinanden ved at centralisere deres sammensatte mekaniske impulser gennem platformen. Dette særlige eksempel på fasekobling er mekanisk, men det kan også være beregningsmæssigt eller neurologisk - som i kakerlakken.
Dens ben ville være analoge med de svingende metronomer, og central neuromuskulær aktivitet analog med den frit svajende platform. I kakerlakken, ikke alle seks ben svinger i samme retning.
"Deres synkronisering er ikke ensartet. Tre ben er synkroniseret i fase med hinanden - for- og bagbenene på den ene side med det midterste ben på den anden side - og de tre er synkroniseret ud af fase med de tre andre, "Sagde Neveln." Det er en skiftende stativgang. Et stativ med tre ben veksler med det andet stativ med tre ben. "
Ubrugelig pogoing
Og ligesom pendula, hvert bens svingninger kan tegnes som en bølge. Alle benenes bølger kan gennemsnitsværdieres til en samlet roach -scurry -bølge og derefter udvikles til mere nyttig matematik, der relaterer centralisering med decentralisering og faktorer som entropi, der kan smide bevægelseskontrol af.
De resulterende principper og matematik kom den klodede robot til gode, som har stærke decentrale signaler i sine benmotorer, der reagerer på benkontakt med jorden, og centraliseret kontrol svagere end pindbugens. Forskerne skitserede robotens bevægelser, også, men de resulterede ikke i den pænt synkroniserede gruppe af bølger, som kakerlakken havde.
Forskerne vendte sig med principperne og matematikken til den klodsede robot, som oprindeligt var ude af slagsen - at bukke eller hoppe ubrugeligt som en pogo -pind. Derefter styrker forskerne den centraliserede kontrol ved at omvægte chassiset for at få det til at bevæge sig mere sammenhængende.
"Metronomerne på platformen er mekanisk kobling, og vores robotkoordinater styrer på den måde, "Neveln sagde." Du kan ændre robotens mekaniske kobling ved at flytte dens vægte. Vi var i stand til at forudsige de ændringer, dette ville foretage ved at bruge den foranstaltning, vi udviklede fra kakerlakken. "
Kakerlak overraskelser
Forskerne tilsluttede også specifikke roach -muskler og neuroner for at observere deres synkopationer med de rasende bølger. Sytten kakerlakker tog 2, 982 gør fremskridt med at informere principperne og matematikken, og fejlene gav også overraskelser på forskerne.
En stak ud:Forskerne havde troet, at signalering centraliserede sig mere, når kakerlakken steg hurtigere, men i stedet, både central og lokal signalering styrket, måske fordobler budskabet:Kør!
Sidste artikelVolocopter får sikkerhedsnøgle i skub for fremtidens lufttaxier
Næste artikelEt bærbart system til at hjælpe synshandicappede
 Varme artikler
Varme artikler
-
 Forsker ved hjælp af computersyn, maskinlæring for at sikre integriteten af integrerede kredslø…Kredit:CC0 Public Domain David Crandall er lektor ved School of Informatics, Computing and Engineering ved Indiana University Bloomington. Han, Sara Skrabalak og Martin Swany er de første IU-forsk
Forsker ved hjælp af computersyn, maskinlæring for at sikre integriteten af integrerede kredslø…Kredit:CC0 Public Domain David Crandall er lektor ved School of Informatics, Computing and Engineering ved Indiana University Bloomington. Han, Sara Skrabalak og Martin Swany er de første IU-forsk -
 JEG, Chatbot:Få dine nyheder fra en snakkesalig automatRise of the chatbot:Jam vedtager en snakkesalig, afslappet tone, krydrer sine drillerier med masser af smiley-emojis, pop-kultur gifs og links til viralt indhold Lyder du nogensinde for dine venne
JEG, Chatbot:Få dine nyheder fra en snakkesalig automatRise of the chatbot:Jam vedtager en snakkesalig, afslappet tone, krydrer sine drillerier med masser af smiley-emojis, pop-kultur gifs og links til viralt indhold Lyder du nogensinde for dine venne -
 Studiet udforsker interaktioner mellem verdens ledere på sociale medierLedernes omtalenetværk afdækket af forskerne. Kredit:Iakhnis &Badawy. Forskere ved University of Southern California (USC) har for nylig udført en undersøgelse, der undersøger interaktionerne mell
Studiet udforsker interaktioner mellem verdens ledere på sociale medierLedernes omtalenetværk afdækket af forskerne. Kredit:Iakhnis &Badawy. Forskere ved University of Southern California (USC) har for nylig udført en undersøgelse, der undersøger interaktionerne mell -
 Ekstreme forhold afventer genopretning af MH370, hvis vraget findesSeabed Constructor-skibet brugt i eftersøgningen af forsvundne Malaysia Airlines MH370, som forsvandt i 2014 Bjærgere er overbeviste om affald, og menneskelige rester kan genfindes, hvis Malaysi
Ekstreme forhold afventer genopretning af MH370, hvis vraget findesSeabed Constructor-skibet brugt i eftersøgningen af forsvundne Malaysia Airlines MH370, som forsvandt i 2014 Bjærgere er overbeviste om affald, og menneskelige rester kan genfindes, hvis Malaysi
- Bløde robotter bruger fugtgradientniveauer til at generere signaler
- Billede:Lake MacKay, Australien fanget af Copernicus Sentinel-2B
- Food Coloring & Science Projects
- Akustisk enhed får piezoelektriske til at synge til en anden melodi
- Håndvævede tekstiler – et skridt på vejen til bæredygtig mode?
- Nye havtemperaturdata hjælper videnskabsmænd med deres varme forudsigelser