


Sværm af bittesmå droner udforsker ukendte miljøer

Dronerne udforsker miljøet ved at flyve i forskellige retninger. Når en drone bemærker en anden drone i dens foretrukne retning, den vil forsøge at flyve i en anden retning. Når dette ikke er muligt (som på dette billede), de lavere prioriterede droner vil bevæge sig af vejen for de højere prioriterede droner. Droner håndterer forhindringer i farten, og derved gå ind og ud af forskellige rum. Kredit:TU Delft/ MAVLab
Forskere har præsenteret en sværm af bittesmå droner, der kan udforske ukendte miljøer helt af sig selv. Dette arbejde, præsenteret i Videnskab robotik den 23. oktober, er et væsentligt skridt inden for sværmrobotik. Udfordringen kommer fra det faktum, at de små 33-grams droner skal navigere autonomt, mens de har ekstremt begrænsede sansnings- og beregningsevner. Det fælles forskerhold - med forskere fra TU Delft, University of Liverpool og Radboud University of Nijmegen – tacklede denne udfordring ved at hente inspiration fra den relative enkelhed af insektnavigation.
Inspiration fra naturen
Insektsværme har inspireret robotister til at tro, at små robotter måske også kan overvinde deres individuelle begrænsninger ved at operere i en sværm. Sværme af små og billige robotter ville være i stand til at udføre opgaver, der i øjeblikket er uden for rækkevidde af store, individuelle robotter. For eksempel, en sværm af små flyvende droner ville være i stand til at udforske et katastrofested meget hurtigere end en enkelt større drone. Sådanne sværme er endnu ikke blevet realiseret.
Søg og Red
I løbet af de sidste fire år, et fælles forskerhold fra TU Delfts universiteter, University of Liverpool, og Radboud University of Nijmegen, finansieret af den hollandske nationale videnskabsfond NWO Natural Artificial Intelligence-program, har stræbt efter at designe en sværm af bittesmå droner, der er i stand til at udforske ukendte miljøer. Målet med forskningsprojektet var at tage skridt til at bruge sværme af droner i eftersøgnings- og redningsscenarier.
Hovedtanken var, at i fremtiden redningsarbejdere vil være i stand til at frigive en sværm af bittesmå droner for at udforske et katastrofested, såsom en bygning, der er ved at kollapse. Sværmen af droner vil komme ind i bygningen, udforske det, og kom tilbage til basestationen med relevante oplysninger. Redningsarbejderne kan derefter fokusere deres indsats på de mest relevante områder – f.eks. hvor der stadig er mennesker indenfor.

Den lille drone passer ind i håndfladen og vejer 33 gram. Sammen med de andre droner i en sværm, den er i stand til hurtigt at udforske et ubemandet miljø. Kredit:TU Delft/ MAVLab
At finde ofre
I projektet blev små droner udstyret med kameraer og sendt ud i et indendørs kontormiljø for at finde to dukker, der repræsenterer ofre i et katastrofescenarie. Denne proof-of-concept søge- og redningsopgave viste tydeligt fordelen ved at have en sværm. Inden for seks minutter, en sværm på seks droner var i stand til at udforske omkring 80 procent af de åbne rum, hvilket ville være umuligt for en af dronerne alene. Desuden, sværmning viste sig også at være nyttig til redundans. En drone fandt et offer, men på grund af en hardwarefejl i kameraet, det kunne ikke bringe nogen billeder tilbage. Heldigvis, en anden drone fangede offeret på kamera, såvel.
Udfordring
"Den største udfordring i at opnå sværmudforskning ligger på niveauet for dronernes individuelle intelligens, " siger Kimberly McGuire, ph.d. elev, der har udført projektet. "I begyndelsen af projektet, vi fokuserede på at opnå grundlæggende flyveevner såsom at kontrollere hastigheden og undgå forhindringer. Efter det, vi har designet en metode til, at de små droner kan opdage og undgå hinanden. Vi løste dette ved at lade hver drone bære en trådløs kommunikationschip og derefter gøre brug af signalstyrken mellem disse chips - det er ligesom antallet af bjælker vist på din telefon, der falder, når du bevæger dig væk fra din WiFi-router i dit hjem. De vigtigste fordele ved denne metode er, at den ikke kræver ekstra hardware på dronen, og at den kræver meget få beregninger."
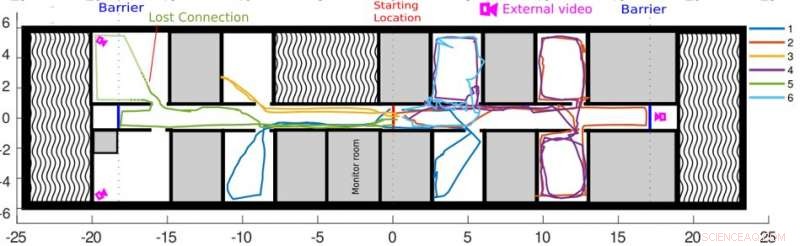
Baner med 6 bittesmå droner, der udforsker en hel kontoretage på mindre end 6 minutter. Dronerne flyver først væk fra basestationen ved startstedet i midten, udforske de åbne rum, og til sidst vende tilbage til basestationen Kredit:TU Delft/ MAVLab
Autonom navigation
Den mest skræmmende udfordring i vejen for sværmudforskning, er vanskeligheden ved at få små robotter til selv at navigere i et ukendt miljø. Grunden til dette er, at bittesmå robotter er meget begrænsede med hensyn til sansning og beregning.
Igen, naturen gav vigtig inspiration. Insekter laver ikke meget detaljerede kort. I stedet, de bevarer vartegn og adfærdsmæssigt relevante steder som fødekilder og deres rede. "Hovedidéen bag den nye navigationsmetode er at reducere vores navigationsforventninger til det yderste:vi kræver kun, at robotterne skal kunne navigere tilbage til basestationen, " siger Guido de Croon, hovedefterforsker af projektet. "Sværmen af robotter spreder sig først ud i miljøet ved at lade hver robot følge en anden foretrukken retning. Efter at have udforsket, robotterne vender tilbage til et trådløst beacon placeret ved basestationen."
Bug algoritme
"Den foreslåede navigationsmetode er en ny type fejlalgoritme, " tilføjer Kimberly McGuire. "Bug-algoritmer laver ikke kort over miljøet, men håndterer forhindringer i farten. I princippet, detaljerede kort er meget praktiske, fordi de tillader en robot at navigere fra ethvert punkt på kortet til ethvert andet punkt, ad en optimal vej. Imidlertid, omkostningerne ved at lave sådan et kort på små robotter er uoverkommelige. Den foreslåede fejlalgoritme fører til mindre effektive veje, men har den fordel, at den endda kan implementeres på små robotter."
 Varme artikler
Varme artikler
-
 Kan San Diegos Brain Corp. blive Microsoft for selvkørende robotter?Kredit:CC0 Public Domain For ti år siden gik computere-neurovidenskabsmand Dr. Eugene Izhikevich væk fra en succesrig karriere i akademiet for at medstifte Brain Corp. med det ambitiøse mål at byg
Kan San Diegos Brain Corp. blive Microsoft for selvkørende robotter?Kredit:CC0 Public Domain For ti år siden gik computere-neurovidenskabsmand Dr. Eugene Izhikevich væk fra en succesrig karriere i akademiet for at medstifte Brain Corp. med det ambitiøse mål at byg -
 Køn er personligt - ikke beregningsmæssigtSkal en algoritme forsøge at gætte, hvad køn mennesker er, efter hvordan de ser ud? Kredit:all_is_magic/Shutterstock.com Forestil dig at gå ned ad gaden og se reklameskærme ændre deres indhold bas
Køn er personligt - ikke beregningsmæssigtSkal en algoritme forsøge at gætte, hvad køn mennesker er, efter hvordan de ser ud? Kredit:all_is_magic/Shutterstock.com Forestil dig at gå ned ad gaden og se reklameskærme ændre deres indhold bas -
 Fiat Chrysler og fagforeningen indgår foreløbig kontrakt i USAFagforeningsarbejdere på Fiat Chryslers bilsamlingsfabrikker som denne, i Warren, Michigan, forventes at stemme om en ny kontrakt den 6. december, 2019 Fiat Chrysler og fagforeningen United Auto W
Fiat Chrysler og fagforeningen indgår foreløbig kontrakt i USAFagforeningsarbejdere på Fiat Chryslers bilsamlingsfabrikker som denne, i Warren, Michigan, forventes at stemme om en ny kontrakt den 6. december, 2019 Fiat Chrysler og fagforeningen United Auto W -
 Vi spurgte folk, om de ville stole på førerløse bilerHvor meget vil du stole på en førerløs bil? Kredit:Shutterstock/metamorworks Vi er lovet en fremtid med førerløse biler på vores veje, men stoler folk virkelig på, at teknologien tager os sikkert
Vi spurgte folk, om de ville stole på førerløse bilerHvor meget vil du stole på en førerløs bil? Kredit:Shutterstock/metamorworks Vi er lovet en fremtid med førerløse biler på vores veje, men stoler folk virkelig på, at teknologien tager os sikkert
- Uber mister licens i London på grund af sikkerhed, løfter om at appellere
- Formning af radiosignaler ved hjælp af lys
- Politiske indlæg forårsager træthed på sociale medier for mange amerikanere
- Hold øje med InSight
- Falske historier hævder, at NASA tilstod at have spredt lithium
- Brug af radiobølger til at bage tumorer