


Ved brug af C-formede hjul kan denne rover klatre over mere udfordrende måneterræn

Lunar Zebro er under test. Kredit:TU Delft
Elevhold er en undervurderet ressource i store dele af det videnskabelige samfund. At slutte sig til et team, der arbejder hen imod et mål, mens du er på universitetet, hvad enten det er til racerløb med solcelledrevne biler eller gravning af fiskedamme i Afrika, er en glimrende måde at skærpe tekniske og projektmæssige færdigheder, samtidig med at kommunikation og teamwork forbedres. Rumindustrien er begyndt at fange disse styrker, hvor elevteams udvikler spændende projekter over hele verden. Et nyligt bidrag kommer fra studerende ved Delft University of Technology i Holland - en seksbenet robot kaldet Lunar Zebro med et unikt look på hjul.
Zebro, en forkortelse for "zes-benige robot", eller seksbenet robot på hollandsk, blev oprindeligt udviklet som et koncept, som eleverne kunne arbejde videre med i 2013. Gruppen, der oprindeligt var beregnet til jordbaserede applikationer, har samlet over 120 studerende i de sidste fem år, besluttet også at udvikle Lunar Zebro med den udtrykkelige hensigt at være den første europæiske rover på månens overflade.
For at navigere i så barskt terræn bruger roveren et unikt bevægelsessystem, der oprindeligt er designet som RHex-projektet ved University of Pennsylvania. Disse hjul gør det muligt for roveren, som kun er på størrelse med et A4-ark, at krydse meget større forhindringer end hjulrovere i sin størrelsesklasse.
Selv med så lille en størrelse kan roveren stadig pakke en anstændig mængde sensorer på sin platform, inklusive to specialfremstillede kameraer og en strålingssensor. Dens oprindelige mission er at forblive operationel på månen og fortsætte med at kommunikere tilbage til jordstationerne på TU Delft i ½ en månedag (eller 14 jorddage), mens den kan modtage strøm fra sollys.
Det er en vanskelig opgave at sikre, at den lille rover kan klare sin måneudfordring. Holdet har allerede testet in situ i nogle af de mest fjendtlige miljøer på Jorden, herunder lavarør i Island og på Alpernes skråninger. Men rummet byder på endnu flere udfordringer, herunder konstant stråling og ekstreme temperaturudsving, som holdet mener, at roveren kan overvinde i sin nuværende konfiguration.
I den konfiguration kan roveren sættes på en hvilken som helst nations månelander, selvom det ikke ser ud til, at elevgruppen har valgt en bestemt lander at tage med. De har heller ikke valgt en tidslinje for, hvornår den lancering kan være. Men det har ikke forhindret dem i at planlægge næste fase allerede.
Det stadie vil omfatte at bruge en af fordelene ved Lunar Zebros lille størrelse - den er relativt billig at fremstille. Det betyder, at nogen kan lave flere af dem - og derefter forbinde dem i en sværm. TU Delft-teamet er ikke det eneste robotteam med den idé, men Lunar Zebro-projektet ser ud til at være en god platform. At forbinde flere små robotsystemer sammen kunne give mere indsigt, end nogen enkelt rover kunne gøre alene.
Men for at komme videre til den del af missionen, skal holdet først have deres første månemission under bæltet. Der kommer fordelene ved et elevdrevet team i fokus. De vil have et uendeligt udbud af studerende, der er villige til at arbejde på projektet, og selve projektet styrker TU Delfts omdømme som et universitet, hvor studerende kan arbejde på avancerede projekter som dette. Disse elever roterer dog også væk efter et vist stykke tid. Nogle har lavet deres egne rumrelaterede virksomheder, men endnu vigtigere, det giver universitetet selv mulighed for at give sine studerende den værdifulde erfaring med at deltage i og endda lede tekniske projekter. En dag kan de endda sige, at de arbejdede på en måne-rover - og det er ret fedt i sig selv. + Udforsk yderligere
Det japanske rumagentur vil sætte Transformable Lunar Robot på månen
 Varme artikler
Varme artikler
-
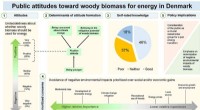 Bio-hvad? Halvdelen af danskerne ved ikke, hvad biomasse erGrafisk abstrakt. Kredit:Vedvarende energi (2022). DOI:10.1016/j.renene.2022.05.075 Næsten halvdelen af danskerne har aldrig hørt om Danmarks største kilde til vedvarende energi. Fundet, rapporte
Bio-hvad? Halvdelen af danskerne ved ikke, hvad biomasse erGrafisk abstrakt. Kredit:Vedvarende energi (2022). DOI:10.1016/j.renene.2022.05.075 Næsten halvdelen af danskerne har aldrig hørt om Danmarks største kilde til vedvarende energi. Fundet, rapporte -
 Teknologi hjælper med at reducere energiomkostningerne på Indiana gård og samtidig beskytte miljø…Teknologi fra Emergent Solar Energy, baseret i Purdue Research Park, hjælper med at reducere energiomkostningerne på en nordisk Indiana -svinefarm. Kredit:Purdue University En alumn fra Purdue Uni
Teknologi hjælper med at reducere energiomkostningerne på Indiana gård og samtidig beskytte miljø…Teknologi fra Emergent Solar Energy, baseret i Purdue Research Park, hjælper med at reducere energiomkostningerne på en nordisk Indiana -svinefarm. Kredit:Purdue University En alumn fra Purdue Uni -
 Hvordan virtual reality forbereder paramedicinere i West AussieKredit:CC0 Public Domain En buschauffør får et hjerteanfald, bevæger sig af vejen og kører ind på en byggeplads. Mange passagerer er såret, og uret tikker. Hvem skal du behandle først? Det er et
Hvordan virtual reality forbereder paramedicinere i West AussieKredit:CC0 Public Domain En buschauffør får et hjerteanfald, bevæger sig af vejen og kører ind på en byggeplads. Mange passagerer er såret, og uret tikker. Hvem skal du behandle først? Det er et -
 Twitter-medarbejdere beordrede at arbejde hjemmefra på grund af virusfrygtPersonale på den globale sociale medieplatform Twitter er blevet beordret til at arbejde hjemmefra for at beskytte mod coronavirus-infektion Twitter har beordret alle medarbejdere globalt til at a
Twitter-medarbejdere beordrede at arbejde hjemmefra på grund af virusfrygtPersonale på den globale sociale medieplatform Twitter er blevet beordret til at arbejde hjemmefra for at beskytte mod coronavirus-infektion Twitter har beordret alle medarbejdere globalt til at a
- Vintage film viser Thwaites Glacier ishylde smelter hurtigere end tidligere observeret
- Mars Astronauter Risiko Rum Hjerne Demens Fra Kosmiske Stråler
- Kunne der eksistere liv i atmosfæren på en planet under Neptun?
- Hvorfor kan vi se vores vejr på en kold vinterdag?
- Soyuz-raket opsender telekommunikationssatellit fra Fransk Guyana
- Hvordan Brunelleschi byggede verdens største kupler