


Bionisk undervandsfartøj inspireret af fisk med forstørrede brystfinner
Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
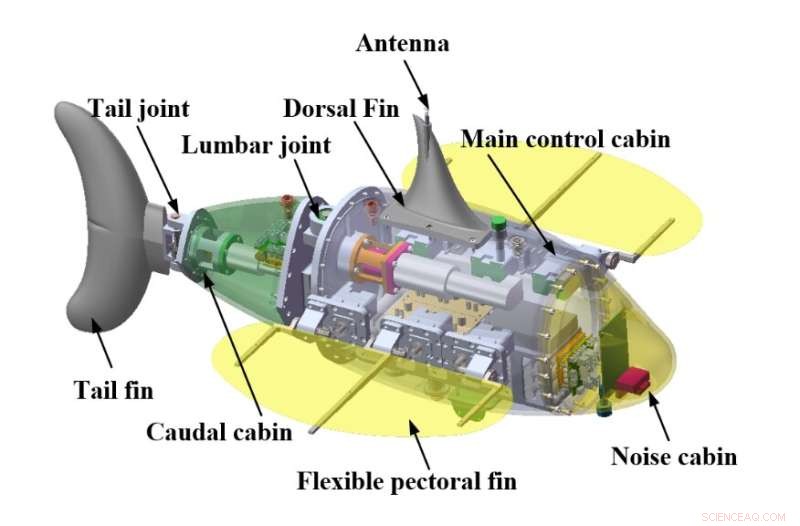
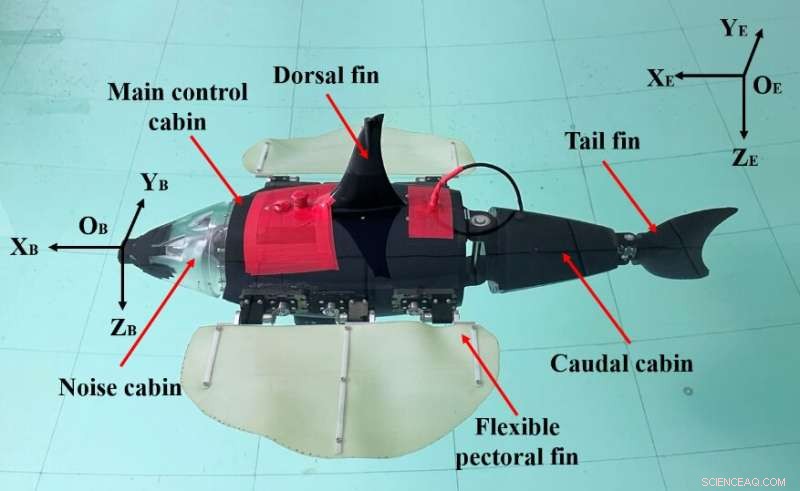
Undervandsrobotter bliver i vid udstrækning brugt som værktøjer til en række marine opgaver. RobDact er sådan et bionisk undervandsfartøj, inspireret af en fisk kaldet Dactylopteridae kendt for sine forstørrede brystfinner. Et forskerhold har kombineret beregningsmæssig væskedynamik og et kraftmålingseksperiment for at studere RobDact, hvilket skaber en nøjagtig hydrodynamisk model af RobDact, der giver dem mulighed for bedre at kontrollere køretøjet.
Holdet offentliggjorde deres resultater i Cyborg and Bionic Systems den 31. maj 2022.
Undervandsrobotter bruges nu til mange marine opgaver, herunder i fiskeriindustrien, undervandsudforskning og kortlægning. De fleste af de traditionelle undervandsrobotter drives af en propel, som er effektiv til at sejle i åbent vand med en stabil hastighed. Undervandsrobotter skal dog ofte kunne bevæge sig eller svæve ved lav hastighed i turbulent vand, mens de udfører en bestemt opgave. Det er svært for propellen at flytte robotten under disse forhold. En anden faktor, når en undervandsrobot bevæger sig ved lave hastigheder i ustabilt strømmende vand, er propellens "twitching"-bevægelse. Denne trækning genererer uforudsigelige væskeimpulser, der reducerer robottens effektivitet.
I de senere år har forskere arbejdet på at skabe undervandsrobotter, der efterligner levende væsner. Disse bioniske køretøjer bevæger sig gennem vandet på samme måde som fisk eller djævlerokker bevæger sig. Sammenlignet med traditionelle undervandsfartøjer fungerer disse bioniske undervandsfartøjer mere effektivt og robust i vandet, samtidig med at de er miljøvenlige.
Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
Undervandsrobotter påvirkes af den omgivende væske, når de bevæger sig gennem vandet. Dette fænomen kaldes den hydrodynamiske effekt. Mens robotten bevæger sig i vandet, skal den håndtere ukendt vandstrøm og kraft, hvilket kan forårsage unødvendige ændringer i robottens position.
For bedre at kontrollere robotten har forskerne brug for en mere nøjagtig hydrodynamisk model. At skabe denne model er normalt meget kompleks og vanskelig. Derudover er det virkelige undervandsmiljø foranderligt og vanskeligt at forudsige, så modelparametrene kan skifte med en ændring i miljøet. Forskere har brugt computational fluid dynamics til at skabe hydrodynamiske modeller for undervandsrobotter.
Imidlertid er de modeller, der er skabt med beregningsvæskedynamik alene, ikke så præcise og praktiske, som de behøver at være. For at overvinde denne udfordring prøvede forskerholdet en anden tilgang. "For at gøre den hydrodynamiske model mere nøjagtig og praktisk kombinerede vi den beregningsmæssige væskedynamik og et kraftmålingseksperiment," sagde Rui Wang, en forsker ved Institut for Automation, Chinese Academy of Sciences.
Kredit:Rui Wang, Institute of Automation, Chinese Academy of Sciences
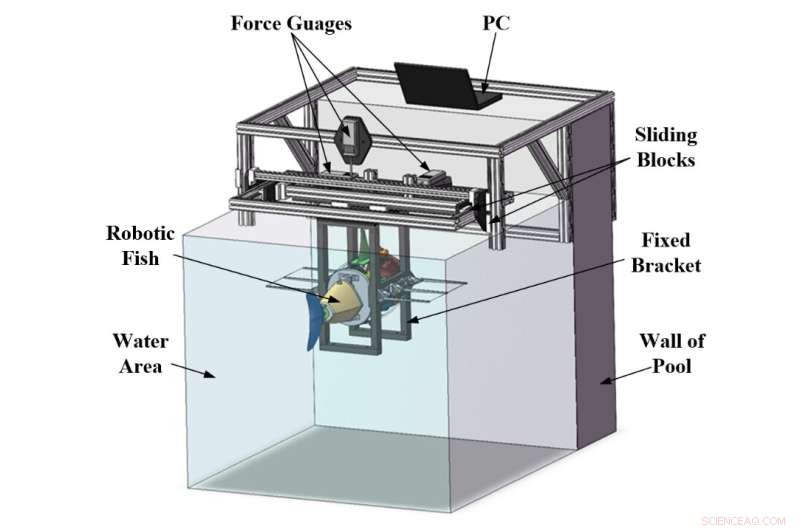
Ved hjælp af computational fluid dynamics identificerede forskerne parametrene i den hydrodynamiske model. Derefter udviklede de en kraftmålingsplatform for at opnå den kraft, der genereres af RobDact-køretøjet. Med denne proces kunne de opnå både den forstyrrende kraft og den kraft, der genereres af RobDact i ethvert komplekst miljø. "Dette kan hjælpe os med at få en bedre forståelse af undervandsfartøjets bevægelsestilstand og kontrollere undervandsfartøjet mere præcist," sagde Qiyuan Cao, en forsker ved Institut for Automation, Chinese Academy of Sciences.
Med deres eksperiment var holdet i stand til at bestemme den hydrodynamiske kraft af RobDact ved forskellige hastigheder. Kraftmålingsplatformen, de udviklede, tillod dem at måle kraften af RobDact i X-, Y- og Z-retningen. De etablerede et kortlægningsforhold mellem RobDact-fluktuationsparametrene og køretøjets fremdrift gennem deres kraftmålingsforsøg. Ved at fusionere RobDacts stive kropsdynamiske model med thrust mapping-modellen var forskerne i stand til at udvikle en nøjagtig og praktisk hydrodynamisk model af RobDact'erne i varierende bevægelser.
Med blikket mod fremtiden har forskerne til hensigt at studere den intelligente kontrol af bioniske undervandsfartøjer ved hjælp af den hydrodynamiske model i forbindelse med kunstig intelligens metoder, såsom forstærkningslæring. "Det ultimative mål er at fremme den praktiske anvendelse af bioniske undervandsfartøjer i vandmiljøovervågning og undervandssøgning og -redning," sagde Wang. + Udforsk yderligere
En bæver-inspireret metode til at guide bevægelserne af en etbenet svømmerobot
 Varme artikler
Varme artikler
-
 Forskere skaber innovativ model for superkritisk kuldioxid-kraftproduktionKredit:CC0 Public Domain Southwest Research Institute og University of Texas i San Antonio samarbejder om at indhente data til en beregningsmodel for superkritisk kuldioxid (sCO) 2 ) energiprodu
Forskere skaber innovativ model for superkritisk kuldioxid-kraftproduktionKredit:CC0 Public Domain Southwest Research Institute og University of Texas i San Antonio samarbejder om at indhente data til en beregningsmodel for superkritisk kuldioxid (sCO) 2 ) energiprodu -
 Hvordan virtual reality giver verdens rutsjebaner et nyt twistNogle af rutsjebanerne på Seaworld i Orlando, Florida. Kredit:Candice Louw Rutsjebaner har været en populær attraktion i forlystelses- og forlystelsesparker rundt om i verden i mere end et århundr
Hvordan virtual reality giver verdens rutsjebaner et nyt twistNogle af rutsjebanerne på Seaworld i Orlando, Florida. Kredit:Candice Louw Rutsjebaner har været en populær attraktion i forlystelses- og forlystelsesparker rundt om i verden i mere end et århundr -
 En omfattende bevægelig taktil sensor baseret på mekanoluminescensDen som fabrikerede bevægelige taktile sensor baseret på samtidig udnyttelse af øjeblikkelig og vedvarende ML. Kredit:LICP Mekanoluminescens (ML) er en af de ældste former for luminescens, henvi
En omfattende bevægelig taktil sensor baseret på mekanoluminescensDen som fabrikerede bevægelige taktile sensor baseret på samtidig udnyttelse af øjeblikkelig og vedvarende ML. Kredit:LICP Mekanoluminescens (ML) er en af de ældste former for luminescens, henvi -
 Tysklands Flixbus tager imod Greyhound med lancering i USAFlixbus planlægger at udvide sit amerikanske netværk til omkring 20 byer inden udgangen af 2018 Den tyske startup Flixbus bragte onsdag sine lave omkostninger, langdistancebusforbindelse til USA
Tysklands Flixbus tager imod Greyhound med lancering i USAFlixbus planlægger at udvide sit amerikanske netværk til omkring 20 byer inden udgangen af 2018 Den tyske startup Flixbus bragte onsdag sine lave omkostninger, langdistancebusforbindelse til USA
- NASA ser Mauritius dækket af den tropiske storm Calvinia
- Latinoer i fagforeninger var bedre beskyttet mod tab af arbejdspladser under pandemi
- Nogle lava -evakuerede kan vende tilbage til hjem under stabil strømning
- At se mindre gennemgående celler:En naturlig enkeltcellet biomagnifier til billedbehandling med sub…
- Globale forsyningskæder som en måde at begrænse CO2-emissioner på
- Onlinestuderende engagerer sig mere i forelæsninger end fysiske deltagere