


Dybderegistrerende billeddannelsessystem kan se gennem tåge

MIT-systemet var i stand til at løse billeder af objekter og måle deres dybde i et område på 57 centimeter. Kredit:Melanie Gonick/MIT
MIT-forskere har udviklet et system, der kan producere billeder af objekter, der er indhyllet af tåge, så tyk, at menneskets syn ikke kan trænge igennem det. Den kan også måle objekternes afstand.
Manglende evne til at håndtere tåget kørselsforhold har været en af de største hindringer for udviklingen af autonome køretøjsnavigationssystemer, der bruger synligt lys, som er at foretrække frem for radarbaserede systemer på grund af deres høje opløsning og evne til at aflæse vejskilte og sporbanemarkører. Så, MIT-systemet kan være et afgørende skridt hen imod selvkørende biler.
Forskerne testede systemet ved hjælp af en lille tank med vand med den vibrerende motor fra en luftfugter nedsænket i den. I tåge så tæt, at menneskets syn kun kunne trænge igennem 36 centimeter, systemet var i stand til at opløse billeder af objekter og måle deres dybde i et område på 57 centimeter.
Syvoghalvtreds centimeter er ikke en stor afstand, men tågen frembragt til undersøgelsen er langt tættere end nogen anden, som en menneskelig chauffør skulle kæmpe med; i den virkelige verden, en typisk tåge kan give en sigtbarhed på omkring 30 til 50 meter. Det afgørende er, at systemet fungerede bedre end menneskets syn, hvorimod de fleste billeddannelsessystemer klarer sig langt dårligere. Et navigationssystem, der endda var lige så godt som en menneskelig chauffør til at køre i tåge, ville være et kæmpe gennembrud.
"Jeg besluttede at tage udfordringen op med at udvikle et system, der kan se gennem egentlig tåge, " siger Guy Satat, en kandidatstuderende i MIT Media Lab, der ledede forskningen. "Vi har at gøre med realistisk tåge, som er tæt, dynamisk, og heterogen. Det er konstant i bevægelse og forandring, med pletter af tættere eller mindre tæt tåge. Andre metoder er ikke designet til at klare sådanne realistiske scenarier. "
Satat og hans kolleger beskriver deres system i et papir, de vil præsentere på den internationale konference om computingfotografering i maj. Satat er første forfatter på papiret, og han får følgeskab af sin afhandlingskonsulent, lektor i mediekunst og videnskab Ramesh Raskar, og af Matthew Tancik, som var kandidatstuderende i elektroteknik og datalogi, da arbejdet var udført.
At spille odds
Ligesom mange af projekterne i Raskars Kamerakulturgruppe, det nye system bruger et time-of-flight kamera, som affyrer ultrakorte udbrud af laserlys ind i en scene og måler den tid, det tager deres refleksioner at vende tilbage.
På en klar dag, lysets returtid angiver nøjagtigt afstandene for de genstande, der reflekterede det. Men tåge får lys til at "sprede, " eller hoppe rundt på tilfældige måder. I tåget vejr, det meste af lyset, der når kameraets sensor, vil være blevet reflekteret af luftbårne vanddråber, ikke efter de typer objekter, som autonome køretøjer skal undgå. Og selv lyset, der reflekterer fra potentielle forhindringer, vil ankomme på forskellige tidspunkter, er blevet afbøjet af vanddråber både på vej ud og tilbage.
MIT-systemet omgår dette problem ved at bruge statistik. Mønstrene produceret af tågereflekteret lys varierer afhængigt af tågens tæthed:I gennemsnit, lys trænger mindre dybt ind i en tyk tåge, end det gør ind i en let tåge. Men MIT-forskerne var i stand til at vise, at uanset hvor tyk tågen er, ankomsttiderne for det reflekterede lys overholder et statistisk mønster kendt som en gammafordeling.
Gamma-fordelinger er noget mere komplekse end Gauss-fordelinger, de almindelige fordelinger, der giver den velkendte klokkekurve:De kan være asymmetriske, og de kan antage en bredere vifte af former. Men ligesom Gaussiske distributioner, de er fuldstændigt beskrevet af to variable. MIT-systemet estimerer værdierne af disse variabler i farten og bruger den resulterende fordeling til at filtrere tågereflektion ud af lyssignalet, der når flyvetidskameraets sensor.
Afgørende, systemet beregner en forskellig gammafordeling for hver af de 1, 024 pixels i sensoren. Det er derfor, det er i stand til at håndtere variationerne i tågetæthed, der forhindrede tidligere systemer:Det kan håndtere omstændigheder, hvor hver pixel ser en anden type tåge.
Signaturformer
Kameraet tæller antallet af lyspartikler, eller fotoner, der når det hvert 56. picosekund, eller billioner af et sekund. MIT-systemet bruger disse rå tællinger til at producere et histogram - i det væsentlige et søjlediagram, med højden af søjlerne, der angiver fotontallet for hvert interval. Derefter finder den den gammafordeling, der passer bedst til formen på søjlediagrammet og trækker blot de tilknyttede fotontal fra de målte totaler. Tilbage er små pigge på de afstande, der korrelerer med fysiske forhindringer.
"Det, der er rart ved det her, er, at det er ret simpelt, " siger Satat. "Hvis du ser på beregningen og metoden, det er overraskende nok ikke komplekst. Vi behøver heller ikke nogen forudgående viden om tågen og dens tæthed, som hjælper den til at arbejde i en bred vifte af tågeforhold."
Satat testede systemet ved hjælp af et tågekammer på en meter langt. Inde i kammeret, han monterede afstandsmarkører med jævne mellemrum, hvilket gav et groft mål for synlighed. Han placerede også en række små genstande - en træfigur, træklodser, silhuetter af bogstaver - som systemet var i stand til at afbilde, selv når de ikke kunne skelnes med det blotte øje.
Der er forskellige måder at måle synlighed på, dog:Objekter med forskellige farver og teksturer er synlige gennem tåge på forskellige afstande. Så, at vurdere systemets ydeevne, han brugte en mere streng metrik kaldet optisk dybde, som beskriver mængden af lys, der trænger ind i tågen.
Optisk dybde er uafhængig af afstand, så ydeevnen af systemet på tåge, der har en bestemt optisk dybde i et område på 1 meter, bør være en god forudsigelse for dets præstation på tåge, der har den samme optiske dybde i en rækkevidde på 30 meter. Faktisk, systemet kan endda klare sig bedre på længere afstande, da forskellene mellem fotonernes ankomsttider vil være større, hvilket kunne give mere nøjagtige histogrammer.
"Dårligt vejr er en af de store resterende forhindringer for autonom kørselsteknologi, " siger Srinivasa Narasimhan, professor i datalogi ved Carnegie Mellon University. "Guy og Rameshs innovative arbejde producerer den bedste synlighedsforbedring, jeg har set ved synlige eller nær-infrarøde bølgelængder og har potentialet til at blive implementeret på biler meget snart."
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
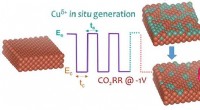 Samtidig tuning af overfladestruktur og oxidationstilstand af kobberkatalysatorerKredit:Arán-Ais et al. Elektrisk energi afledt af vedvarende kilder kunne bruges til at omarrangere bindinger i kuldioxid (CO 2 ) og vandmolekyler til komplekse kulbrinter, som derefter kan bræn
Samtidig tuning af overfladestruktur og oxidationstilstand af kobberkatalysatorerKredit:Arán-Ais et al. Elektrisk energi afledt af vedvarende kilder kunne bruges til at omarrangere bindinger i kuldioxid (CO 2 ) og vandmolekyler til komplekse kulbrinter, som derefter kan bræn -
 Den britiske rejsegigant Thomas Cook står over for kollapsDet kan være enden på en lang vej Thomas Cooks 178-årige eksistens hang i en tråd i søndags, efter at det ikoniske britiske rejsefirma kæmpede for at finde yderligere private investeringer og nu e
Den britiske rejsegigant Thomas Cook står over for kollapsDet kan være enden på en lang vej Thomas Cooks 178-årige eksistens hang i en tråd i søndags, efter at det ikoniske britiske rejsefirma kæmpede for at finde yderligere private investeringer og nu e -
 Undersøgelse viser, at folk foretrækker vindmøller som naboer frem for andre energianlægEn ny UD-undersøgelse viser, at folk, der bor tæt på vindkraftprojekter, foretrækker dem frem for energialternativer. Kredit:University of Delaware En ny University of Delaware undersøgelse unders
Undersøgelse viser, at folk foretrækker vindmøller som naboer frem for andre energianlægEn ny UD-undersøgelse viser, at folk, der bor tæt på vindkraftprojekter, foretrækker dem frem for energialternativer. Kredit:University of Delaware En ny University of Delaware undersøgelse unders -
 Mød fremtidens landmænd:RobotterI denne torsdag, 27. september, 2018, foto en robotarmløfter planter, der dyrkes ved Iron Ox, en indendørs robotgård, i San Carlos, Calif. På den indendørs gård, robotbønder, der ruller manøvrer genne
Mød fremtidens landmænd:RobotterI denne torsdag, 27. september, 2018, foto en robotarmløfter planter, der dyrkes ved Iron Ox, en indendørs robotgård, i San Carlos, Calif. På den indendørs gård, robotbønder, der ruller manøvrer genne
- Ud over Jupiter, forskere opdager en vugge af kometer
- Undersøgelse undersøger, hvorfor studerende-atleter får adgang til færre akademisk støtte, tjen…
- Frygt for naturbrande inspirerer fremadstormende samfund
- DNA fra 31, 000 år gamle mælketænder fører til opdagelse af en ny gruppe af gamle sibirere
- Presset for at gøre forsyningskæderne mere bæredygtige tager fortsat fart
- Grøn omstilling:Hele verden kan lære af en lille by på Island