


AI kan hjælpe droner med at køre luftstrømme som fugle

Svæveflypiloter leder efter opdrift for at forblive i luften. Kredit:Shutterstock
Fugle har længe inspireret mennesker til at skabe deres egne måder at flyve på. Vi ved, at skyhøje fuglearter, der vandrer over lange afstande, bruger termiske opdrift til at blive i luften uden at bruge energi, der blafrer med vingerne. Og svæveflypiloter bruger på samme måde termiske strømme og andre områder med stigende luft for at forblive luftbårne i længere tid.
Endnu, mens vi har mestret at glide gennem disse opdateringer ved hjælp af forskellige instrumenter, de nøjagtige mekanismer, der gør det muligt for fugle at svæve, er stadig ukendt. Men et team af forskere fra Californien og Italien har taget nogle sigende skridt mod at besvare dette spørgsmål ved hjælp af kunstig intelligens (AI). Og det kan føre til ny udvikling inden for navigationssystemer til fly, med særlige konsekvenser for at skabe droner, der kan forblive i luften i meget lange perioder.
Formålet med undersøgelsen, udgivet i Natur , skulle træne et lille autonomt svævefly på to meter til at flyve i termik, ligesom en rigtig fugl ville. Svæveflyet var programmeret med en slags AI kendt som maskinlæring, der gjorde det muligt at finde ud af, hvordan man brugte luftstrømmene til at blive i luften længere.
Maskinlæring er en alternativ tilgang til programmering af en computer til at udføre en kompleks opgave. I stedet for at fodre en computer (eller autonom svævefly i dette tilfælde) et sæt instruktioner, der fortæller, hvordan man gør noget, du fortæller computeren, hvordan du gerne vil have, at den reagerer og belønner den, når den gør det rigtige.
Over tid vil den lære, hvilke ting der belønnes, og vil i stedet have denne adfærd. Denne teknik er, hvordan computerprogrammer som Googles AlphaGo kan lære at spille brætspillet Go og derefter slå professionelle spillere, en bedrift simpelthen ikke mulig med konventionelle programmeringsteknikker.
Denne type maskinindlæring kaldes forstærkningslæring, og den er afhængig af, at en stor mængde inputdata fødes til computeren, for at den kan lære, hvilke handlinger der vil give den belønninger. For forskerne, der programmerer det autonome svævefly, inputdataene bestod af specialiserede instrumenter, der var i stand til at aflæse ændringen i opadgående (lodret) vindstyrke. Instrumenterne var i stand til at bestemme disse ændringer langs svæveflyets længde (i længderetningen) og fra den ene vingespids til den anden (lateralt). Sensorerne var i stand til at foretage disse målinger ti gange hvert sekund.
Disse data blev derefter brugt til at foretage flyjusteringer til det, der er kendt som svæveflyets bankvinkel. Et velafbalanceret fly med vingernes niveau har nul bankvinkel og flyver i en lige linje. At vippe vingerne og øge bankvinklen får flyet til at dreje. I undersøgelsen, svæveflyet blev belønnet, hvis ændringen i opadgående vindhastighed langs dens flyvesti steg. Med andre ord, hvis svæveflyet fløj ind i et opdrift.
Updrafts er nøglen til at øge den tid, et svævefly kan forblive i luften. I modsætning til et drevet fly, et svævefly, der ikke er i stand til at finde nogen opdrift, vil gradvist falde mod jorden. Om svæveflyet falder eller stiger, afhænger direkte af, hvor meget luft der bevæger sig opad omkring det. I en opdatering, stigningen i lodret luftbevægelse kan være nok til at stoppe svæveflyet og hvis den lodrette vind er stærk nok, lad den klatre.
I løbet af et antal flyvninger (ca. 16 timers flyvning i alt), undersøgelsesglideren lærte at flyve ved at træne sig selv, at under en bestemt kombination af input (bankvinkel, længde- og lateral ændring lodret vindhastighed) for at bestemme, hvad den næste ændring i bankvinkel skal være. Resultatet var, at ved afslutningen af alt det, der flyvede, havde flyet lært sig selv at flyve ind i opdrift, så den kan blive længere i luften.
Som en bonus, forskerne brugte en numerisk model til at vise, at denne tilgang ville gavne større svævefly endnu mere, da deres længere vingefang vil give en mere præcis måling af ændringen i opadgående vindhastighed fra en vingespids til en anden.
Gør fly smartere
Resultaterne rejser spørgsmålet om, hvilke mulige futuristiske autonome svævefly vi kunne se glide rundt, og hvad ville de blive brugt til. Ingeniører på MIT tog for nylig inspiration fra aerodynamikken i den bølgende ridende albatross til at designe et autonomt svævefly.
Airbus har udviklet en soldrevet svævefly, der kan forblive i luften i meget lange perioder som et alternativ til overvågnings- eller kommunikationssatellitter, for eksempel, der kunne udsende internetsignaler til fjerntliggende steder på jorden. Microsoft arbejder angiveligt på autonome fly med state-of-the-art kunstige intelligente navigationssystemer.
Men måske kunne teknikkerne udviklet i denne undersøgelse en dag føre til en ny generation af "smarte" navigations- og autopilotsystemer til konventionelle fly. Disse kunne bruge data indsamlet over tusinder af timers flyvetid til at træffe beslutning om den mest effektive måde at komme rundt på. Dette ville stole på nøjagtige sensorer og videreudvikling, der ville gøre det muligt for et fly at identificere og derefter hoppe fra en termisk opdatering til en anden. I øjeblikket, metoden tillader kun glidning inde i en enkelt termisk.
Metoderne og programmeringsteknikkerne udviklet af forskerne vil uden tvivl bringe os et skridt tættere på målet om et autonomt flyvende køretøj med flyvetider i dage, uger eller måneder med at udføre disse opgaver. Men det er brugen af forstærkningslæring, der igen viser, hvor fleksible disse algoritmer er til at tilpasse sig en lang række komplekse opgaver, fra at styre et svævefly til at slå et menneske ved Go.
Denne artikel er genudgivet fra The Conversation under en Creative Commons -licens. Læs den originale artikel. 
 Varme artikler
Varme artikler
-
 Deezer udforsker AI-system til musik, der matcher humørKredit:CC0 Public Domain Deezer er en Frankrig-baseret personlig musikstreamingtjeneste. De er ambitiøse i at sikre sig en plads i frontlinjen af streamingbranchen. Tegn er, at de arbejder på te
Deezer udforsker AI-system til musik, der matcher humørKredit:CC0 Public Domain Deezer er en Frankrig-baseret personlig musikstreamingtjeneste. De er ambitiøse i at sikre sig en plads i frontlinjen af streamingbranchen. Tegn er, at de arbejder på te -
 I ny bog, forskere behandler udfordringerne ved at indføre additiv fremstillingKredit:CC0 Public Domain Additiv fremstilling lover som en hurtigere, mindre bekostelig og mere effektiv metode til at fremstille dele til en bred vifte af industrier, fra rumfart og bilindustrien
I ny bog, forskere behandler udfordringerne ved at indføre additiv fremstillingKredit:CC0 Public Domain Additiv fremstilling lover som en hurtigere, mindre bekostelig og mere effektiv metode til at fremstille dele til en bred vifte af industrier, fra rumfart og bilindustrien -
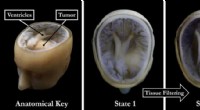 Ny 3D-udskrivningsteknik muliggør hurtigere, bedre, og billigere modeller af patientspecifikke medi…Denne 3D-printede model af Steven Keatings kranium og hjerne viser tydeligt hans hjernesvulst og andre fine detaljer takket være den nye databehandlingsmetode, som undersøgelsens forfattere var banebr
Ny 3D-udskrivningsteknik muliggør hurtigere, bedre, og billigere modeller af patientspecifikke medi…Denne 3D-printede model af Steven Keatings kranium og hjerne viser tydeligt hans hjernesvulst og andre fine detaljer takket være den nye databehandlingsmetode, som undersøgelsens forfattere var banebr -
 Dubai lufthavn rapporterer første fald i passagertallet i 20 årPå trods af at han registrerede sit første fald i passagertallet i to årtier, Dubai International bevarede sin position som verdens travleste lufthavn for internationale passagerer, slog Londons Heath
Dubai lufthavn rapporterer første fald i passagertallet i 20 årPå trods af at han registrerede sit første fald i passagertallet i to årtier, Dubai International bevarede sin position som verdens travleste lufthavn for internationale passagerer, slog Londons Heath
- Indlæg på sociale medier kan signalere, om en protest bliver voldelig
- Hvordan får stenskove deres pigge? Ny forskning giver et skarpt svar
- Efterhånden som Titanic forfalder, ekspeditionen vil overvåge forringelsen
- Chinas Geely tager aktier i det tyske flyvende taxifirma Volocopter
- Mød den hominin-art, der gav os genital herpes
- Hjernescanningsbeviser i straffedom:En velsignelse og en forbandelse