


Små flyvende robotter trækker tunge byrder
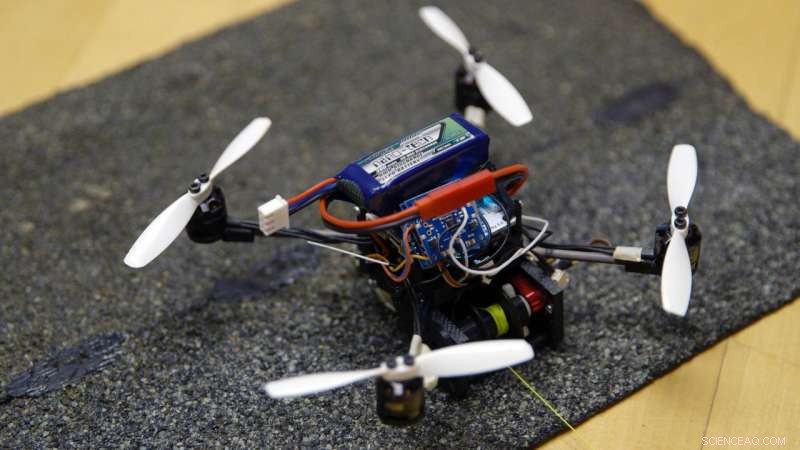
En FlyCroTug med mikrospines indgreb på en tagsten, så den kan trække en vandflaske op. Kredit:Kurt Hickman
En lukket dør er blot en af mange forhindringer, der ikke udgør nogen hindring for en ny type flyvning, mikro, slæberobot kaldet en FlyCroTug. Udstyret med avancerede gribeteknologier og evnen til at flytte og trække på objekter omkring den, to FlyCroTugs kan i fællesskab lasso dørhåndtaget og åbne døren.
Udviklet i laboratorier af Mark Cutkosky, Fletcher Jones-stolen på School of Engineering ved Stanford University, og Dario Floreano ved École Polytechnique Fédérale de Lausanne i Schweiz, FlyCroTugs er mikroluftfartøjer, som forskerne har modificeret, så køretøjerne kan forankre sig til forskellige overflader ved hjælp af klæbemidler inspireret af gekkoers og insekters fødder, tidligere udviklet i Cutkoskys laboratorium.
Med disse fastgørelsesmekanismer, FlyCroTugs kan trække genstande op til 40 gange deres vægt, som dørhåndtag i ét scenarie, eller kameraer og vandflasker i en redningssituation. Lignende køretøjer kan kun løfte genstande omkring det dobbelte af deres egen vægt ved hjælp af aerodynamiske kræfter.
"Når du er en lille robot, verden er fuld af store forhindringer, " sagde Matthew Estrada, en kandidatstuderende ved Stanford og hovedforfatter på et papir om FlyCroTugs, udgivet 25. oktober i Science Robotics . "At kombinere de aerodynamiske kræfter fra vores luftfartøj sammen med interaktionskræfter, som vi genererer med fastgørelsesmekanismerne, resulterede i noget, der var meget mobilt, meget kraftfuld og mikro også."
Forskerne siger, at FlyCroTugs' lille størrelse betyder, at de kan navigere gennem hyggelige rum og ret tæt på mennesker, gør dem nyttige til eftersøgning og redning. Holder godt fast til overflader, mens de trækker, de små robotter kan muligvis flytte stykker snavs eller placere et kamera for at evaluere et forræderisk område.
At tage udgangspunkt i naturen
Som med de fleste projekter i Cutkoskys laboratorium, FlyCroTugs var inspireret af den naturlige verden. I håb om at have et fly, der var hurtigt, lille og meget manøvredygtig, men også i stand til at flytte store byrder, forskerne kiggede på hvepse.
"Hvepse kan flyve hurtigt til et stykke mad, og så hvis tingen er for tung til at tage afsted med, de trækker den hen ad jorden. Så dette var en slags begyndelsesinspiration for den tilgang, vi tog, "sagde Cutkosky, der er medforfatter til papiret.
Forskerne læste undersøgelser om fangst og transport af hvepsebytte, som identificerer forholdet mellem flyverelaterede muskler og totalmasse, der afgør, om en hveps flyver med sit bytte eller trækker det. De fulgte også hvepsens føring med at have forskellige fastgørelsesmuligheder afhængigt af hvor FlyCroTugs lander.
Til glatte overflader, robotterne har gekko-gribere, ikke-klæbende klæbemidler, der efterligner en gekkos indviklede tåstrukturer og holder fast ved at skabe intermolekylære kræfter mellem klæbemidlet og overfladen. Til ru overflader, disse robotter er udstyret med 32 mikrospines, en serie af fiskekroglignende metalpigge, der individuelt kan låse fast i små gruber i en overflade.
Hver FlyCroTug har et spil med et kabel og enten mikrospines eller gekko -klæbemiddel for at trække. Ud over disse faste funktioner er de ellers meget modificerbare. Placeringen af griberne kan variere afhængigt af overfladen, hvor de vil lande, og forskerne kan også tilføje dele til jordbaseret bevægelse, såsom hjul. At få alle disse funktioner ind i et lille luftfartøj med dobbelt vægt af en golfbold var ingen lille bedrift, ifølge forskerne.
"Folk har en tendens til at tænke på droner som maskiner, der flyver og observerer verden, men flyvende insekter gør mange andre ting - såsom at gå, klatring, fatter, bygning – og sociale insekter kan endda samarbejde for at formere kræfter, " sagde Floreano, som var seniorforfatter på avisen. "Med dette arbejde, vi viser, at små droner, der er i stand til at forankre til miljøet og samarbejde med andre droner, kan udføre opgaver, der typisk er tildelt humanoide robotter eller meget større maskiner."
Interagerer med verden
Droner og andre små flyvende robotter kan virke som alle raseri i disse dage, men FlyCroTugs - med deres evne til at navigere til fjerntliggende steder, anker og træk – falder ind i en mere specifik niche, ifølge Cutkosky.
"Der er mange laboratorier rundt om i verden, der begynder at arbejde med små droner eller luftkøretøjer, men hvis du ser på dem, der også tænker på, hvordan disse små køretøjer kan interagere fysisk med verden, det er et meget mindre sæt, " han sagde.

FlyCroTug-designet var inspireret af hvepses evne til at låse sig fast på en overflade og trække tungt bytte. Kredit:Estrada et al., Sci. Robot. 3, eaau6903 (2018)
Forskerne kan med succes åbne en dør med to FlyCroTugs. De havde også en flue oven på en smuldrende struktur og slæbte et kamera op for at se indeni. Næste, de håber at arbejde på autonom kontrol og logistikken ved at flyve flere køretøjer på én gang.
"Værktøjerne til at skabe køretøjer som dette bliver mere tilgængelige, " sagde Estrada. "Jeg er begejstret over udsigten til i stigende grad at inkorporere disse fastgørelsesmekanismer i designerens værktøjsbælte, gør det muligt for robotter at drage fordel af interaktionskræfter med deres miljø og bringe disse til enden. "
 Varme artikler
Varme artikler
-
 Vedvarende teknologipriser og dekarboniseringKredit:CC0 Public Domain Den store fordel ved fossile brændstoffer frem for vedvarende energi er, at solen ikke altid skinner, og vinden ikke altid blæser, og disse intermitterende energikilder er
Vedvarende teknologipriser og dekarboniseringKredit:CC0 Public Domain Den store fordel ved fossile brændstoffer frem for vedvarende energi er, at solen ikke altid skinner, og vinden ikke altid blæser, og disse intermitterende energikilder er -
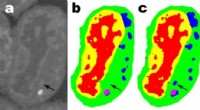 Minimalistiske maskinlæringsalgoritmer analyserer billeder fra meget få dataBilleder af et udsnit af muselymfblastoidceller; en. er rådata, b er den tilsvarende manuelle segmentering og c er output fra et MS-D-netværk med 100 lag. Kredit:Data fra A. Ekman og C. Larabell, Nati
Minimalistiske maskinlæringsalgoritmer analyserer billeder fra meget få dataBilleder af et udsnit af muselymfblastoidceller; en. er rådata, b er den tilsvarende manuelle segmentering og c er output fra et MS-D-netværk med 100 lag. Kredit:Data fra A. Ekman og C. Larabell, Nati -
 Feds:Lastbilchauffør forårsagede sandsynligvis selvkørende shuttlestyrtDenne 8. nov. 2017, filfoto af KVVU-reporter Kathleen Jacob viser en førerløs shuttlebus, efter at den kolliderede med en stor rig i Las Vegas. Føderale efterforskere siger, at en kollision mellem en
Feds:Lastbilchauffør forårsagede sandsynligvis selvkørende shuttlestyrtDenne 8. nov. 2017, filfoto af KVVU-reporter Kathleen Jacob viser en førerløs shuttlebus, efter at den kolliderede med en stor rig i Las Vegas. Føderale efterforskere siger, at en kollision mellem en -
 Google-medarbejdere underskriver protestbrev over Kinas søgemaskine:NYTGoogle-medarbejdere er angiveligt bekymrede over et hemmeligt censorvenligt søgemaskineprojekt for Kina Hundredvis af Google-ansatte har underskrevet et protestbrev over virksomhedens rapporterede
Google-medarbejdere underskriver protestbrev over Kinas søgemaskine:NYTGoogle-medarbejdere er angiveligt bekymrede over et hemmeligt censorvenligt søgemaskineprojekt for Kina Hundredvis af Google-ansatte har underskrevet et protestbrev over virksomhedens rapporterede
- Team tager et stort skridt mod trykte anisotrope magneter
- Billede:Kolliderende vejrfronter på Jupiter
- Politisk parterapi kunne helbrede et splittet Amerika, undersøgelse finder
- Vil amerikanske universitetsstuderendes liv for altid blive forvandlet af COVID-19?
- Sådan finder du længden og bredden af et rektangel, når du får vist området
- Sierpinski-trekantens fremragende generative potentiale