


En tilgang til bevægelsesplanlægning på asteroideoverflader med uregelmæssige tyngdefelter
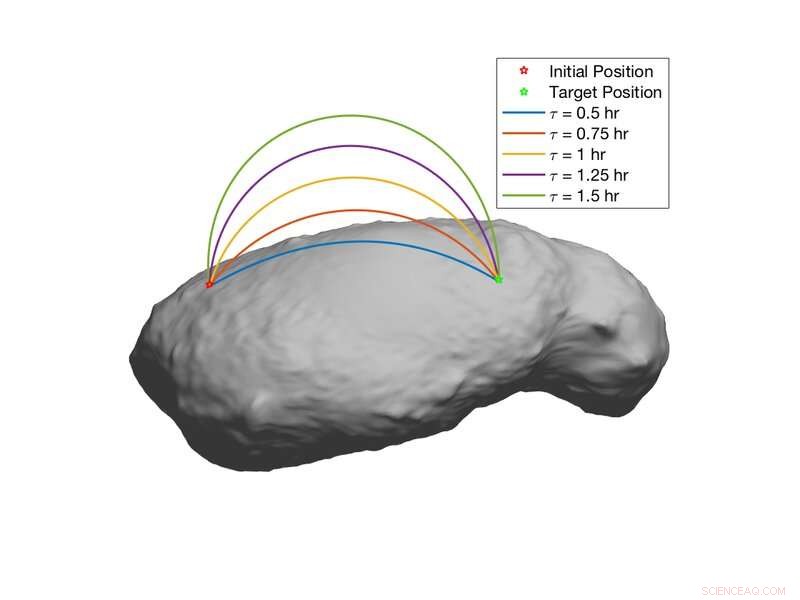
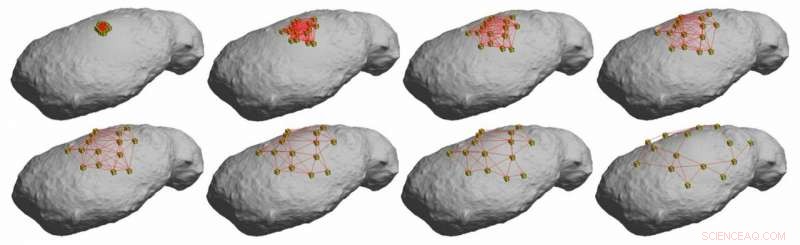
Hoppebaner fra den oprindelige placering til en målplacering på overfladen af Itokawa. Kredit:Kalita &Thangavelautham.
Asteroider er små, klippelegemer, der kredser om solen, der er for små til at blive kaldt planeter. Der er millioner af asteroider i solsystemet, varierende i størrelse, form og sammensætning. Udforskningen af asteroider kan hjælpe med at afdække fascinerende information om solsystemets oprindelse, af planeten Jorden, og selve livet.
Asteroider kunne også tjene som strategiske steder for planetarisk videnskab, ressourceudvinding, kommunikationsrelæer eller planetarisk forsvar. Indtil nu, imidlertid, at udforske overfladerne på asteroider har vist sig at være meget udfordrende på grund af deres lave og meget ikke-lineære tyngdefelt.
Seneste asteroide missioner, såsom Hayabusa II og OSIRIS-Rex var blot fly-by eller touch-and-go operationer. Forskere har således forsøgt at udvikle teknologi, der ville muliggøre udforskning af asteroideoverflader, for eksempel, ved hjælp af in situ-instrumenter til at analysere deres sammensætning og materiale under overfladen.
Hopperobotter kunne være særligt nyttige til udforskning af sådanne overflader, da mobilitet gennem ballistisk hop har flere fordele ved tilstedeværelsen af uregelmæssige tyngdekraftsfelter. Disse typer robotter kan krydse store afstande over ujævnt terræn, med begrænset energiforbrug. Et team af forskere ved University of Arizona har for nylig udviklet ballistisk hoppedynamik og en ny tilgang til bevægelsesplanlægning på asteroideoverflader.
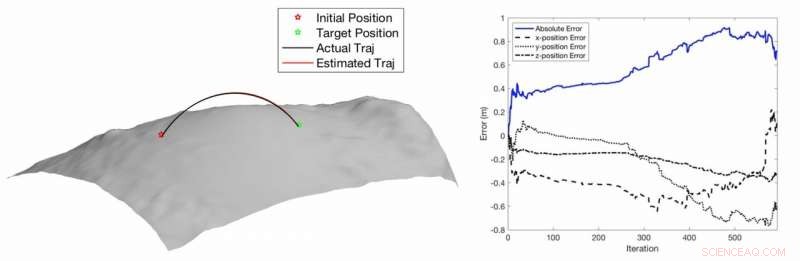
Selvlokalisering ved hjælp af 3D-punktskyscanning. Kredit:Kalita &Thangavelautham.
"I modsætning til Jorden, asteroidens tyngdekraft er lav, som sådanne hopperovere er mere velegnede, da de kan tilbagelægge store afstande over vilkårligt ujævnt terræn med forbrug af lidt energi, " Himangshu Kalita, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Imidlertid, deres uregelmæssige form resulterer i et meget uregelmæssigt tyngdefelt, hvilket gør hop meget usikker. Dermed, Der kræves en sekventiel arkitektur til hopping rover autonomi, der kan planlægge forud, før ethvert hop udføres og samtidig lokalisere sig selv."
Fremgangsmåden udtænkt af Kalita og hans kollega Jekan Thanga beregner den hastighed, der kræves for at opsnappe et mål og lokaliserer derefter den hoppende robot. For at lokalisere robotten, forskerne brugte positur-estimeringsmetoder baseret på successiv scanningsmatchning ved hjælp af en 3-D laserscanner.
Den indsamlede information bruges efterfølgende til at planlægge hopperobottens bevægelse på målasteroidens overflade. Robotten skal udføre flere hop for at nå et ønsket sted på asteroiden, samtidig med at du undgår forhindringer.
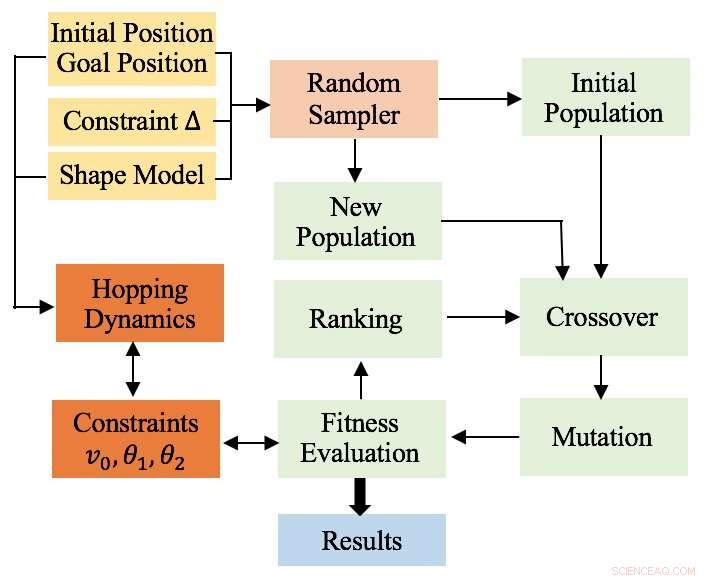
Skematisk over den optimerede stiplanlægger ved hjælp af evolutionær algoritme. Kredit:Kalita &Thangavelautham.
"Den bevægelsesplanlægningsarkitektur, der er diskuteret i papiret, kan finde næsten optimale baner for en hoppende rover for at nå en målplacering fra dens oprindelige placering på overfladen af en asteroide med uregelmæssige tyngdefelter, " Kalita forklarede. "Vores tilgang bruger en high-fidelity dynamikmodel til at udføre trial and error-evaluering i simulering af kandidatmanøvrer for at bestemme deres egnethed. Prøve- og fejlevalueringen tager højde for risiko, belønninger og lokale usikkerheder."
Mange asteroider er rige på ressourcer såsom vand, kulstofforbindelser, jern- og platingruppemetaller. Nogle asteroider indeholder også rester af eksisterende planeter og kan således tjene som 'tidskapsler', giver uberørte optegnelser over den tidlige geologi og geo-historie af sådanne planeter. Udforskning af disse asteroider kan give værdifuld indsigt i solsystemets oprindelse og planeter indeholdt med det. I fremtiden, tilgangen udtænkt af Thanga og Kalita kunne bane vejen for udforskningen af asteroideoverflader, fører til interessante observationer og opdagelser.
-
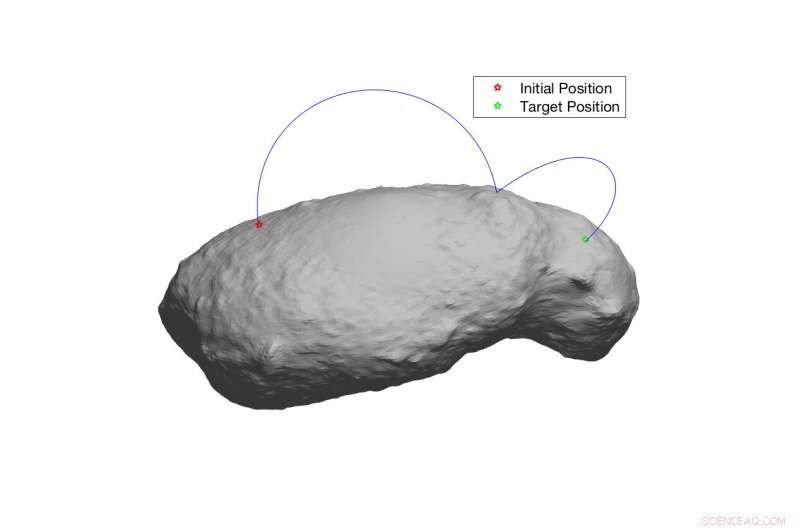
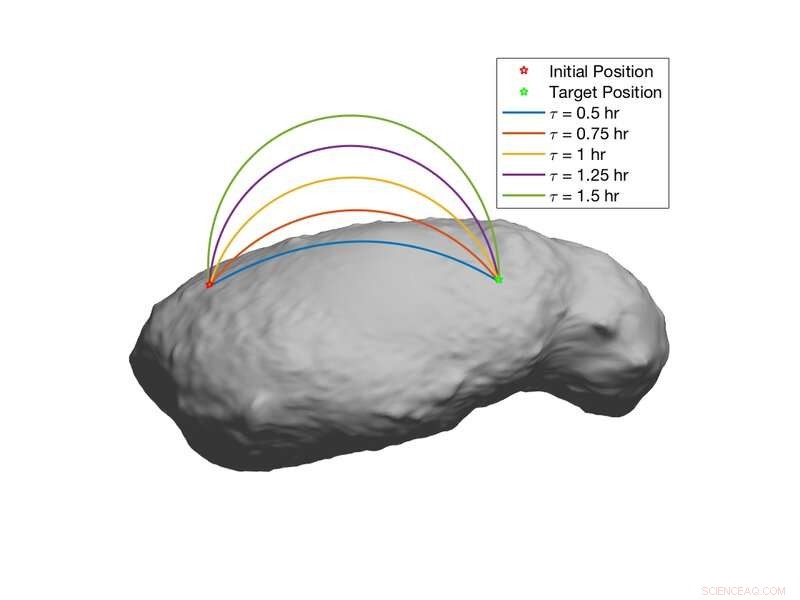
Optimal bane genereret af stiplanlæggeren for at nå en målplacering. Kredit:Kalita &Thangavelautham.
-
Flere rovere udforsker overfladen af asteroiden Itokawa i samarbejde. Kredit:Kalita &Thangavelautham.
-
Hoppebaner fra den oprindelige placering til en målplacering på overfladen af Itokawa. Kredit:Kalita &Thangavelautham.
"Flyvej og langdistanceobservation af asteroider er utilstrækkelig til at bestemme, hvad der er under det øverste lag af asteroider, " sagde Thanga. "Vores tilgang, som indebærer at udføre ballistisk hop til overfladeudforskning af asteroider, kan besvare disse spørgsmål. I øvrigt, rovere udsat på asteroide overflader til dato er afhængige af et moderskib til lokalisering, men deres møde sjældent. Vores simuleringer viser, at ved at bruge en 3-D kortlægningssensor ombord, roverne kan udføre moderskibsuafhængig selvlokalisering, hvilket er en forløber for roverautonomi."
Fremgangsmåden udviklet af Thanga og Kalita er designet til effektivt at planlægge bevægelsen af en hoppende robot over lange afstande, på asteroideoverflader med uregelmæssige tyngdefelter. Den samme tilgang kunne anvendes på flere koordinerede robotter, der samtidigt udforsker en given asteroides overflade. Forskerne har også udvidet deres metode til at beregne flere optimale baner, hvilket ville gøre det muligt for en robot at nå et ønsket mål, mens han besøger flere waypoints.
"Vi er nu i gang med at udvikle prototyper til miniaturiseret hopping rover, der vil bruge sublimatbaserede drivmidler til hop, " sagde Kalita. "Med simulerede uregelmæssige tyngdekraftsfelter, vi vil være i stand til at teste vores tilgang til at finde hoppebaner."
© 2019 Science X Network
Sidste artikelFind nøglehuller i metal 3-D print
Næste artikelSmil:Nogle passagerfly har kameraer på ryglænsskærme
 Varme artikler
Varme artikler
-
 Ny blå-grøn løsning til genbrug af verdens batterierRice University-studerende Kimmai Tran og hendes kolleger har udviklet en miljøvenlig løsning til at fjerne værdifulde kobolt- og lithiummetaller fra brugte lithium-ion-batterier. Kredit:Jeff Fitlow/R
Ny blå-grøn løsning til genbrug af verdens batterierRice University-studerende Kimmai Tran og hendes kolleger har udviklet en miljøvenlig løsning til at fjerne værdifulde kobolt- og lithiummetaller fra brugte lithium-ion-batterier. Kredit:Jeff Fitlow/R -
 Eksperimentelt hjernestyret høreapparat afkoder, identificerer, hvem du vil høreDr. Mesgranis eksperimentelle hjernekontrollerede høreapparat (afbildet på skærmen) tilbyder en lovende løsning på cocktailpartyproblemet, der plager nutidens høreapparater. Kredit:Diane Bondareff for
Eksperimentelt hjernestyret høreapparat afkoder, identificerer, hvem du vil høreDr. Mesgranis eksperimentelle hjernekontrollerede høreapparat (afbildet på skærmen) tilbyder en lovende løsning på cocktailpartyproblemet, der plager nutidens høreapparater. Kredit:Diane Bondareff for -
 Oppustelige rumrobotter med integrerede dielektriske elastomertransducere (DET'er)Kredit:Ashby et al. Forskere ved Auckland Bioengineering Institute og Technische Universität Dresden har for nylig designet en ny type oppustelig robot til rumnavigation. Disse robotter, præsenter
Oppustelige rumrobotter med integrerede dielektriske elastomertransducere (DET'er)Kredit:Ashby et al. Forskere ved Auckland Bioengineering Institute og Technische Universität Dresden har for nylig designet en ny type oppustelig robot til rumnavigation. Disse robotter, præsenter -
 Det er sikkert at bruge din telefon på et fly – men indtil videre kan du stadig ikke foretage opkal…Intet problem, Jeg kan tale. Kredit:Zurijeta/Shutterstock.com I løbet af Thanksgiving-rejseperioden planlægger anslået 30 millioner amerikanere at flyve for at nyde kalkun og alt tilbehøret med fj
Det er sikkert at bruge din telefon på et fly – men indtil videre kan du stadig ikke foretage opkal…Intet problem, Jeg kan tale. Kredit:Zurijeta/Shutterstock.com I løbet af Thanksgiving-rejseperioden planlægger anslået 30 millioner amerikanere at flyve for at nyde kalkun og alt tilbehøret med fj
- Håndholdt NMR-instrument giver hurtig analyse af humane tumorer
- Tysklands Bosch tænder brintceller til biler
- Aftalen indgået for at redde Londons røde busproducent:ejer
- Team tager et stort skridt mod trykte anisotrope magneter
- Klimaændringer kan få koraller til at klare det alene
- Personlig DJ-musikafspilningsliste-algoritme matcher sange til lyttere, der skifter stemning