


Atomsprænghoveder? Denne robot kan finde dem
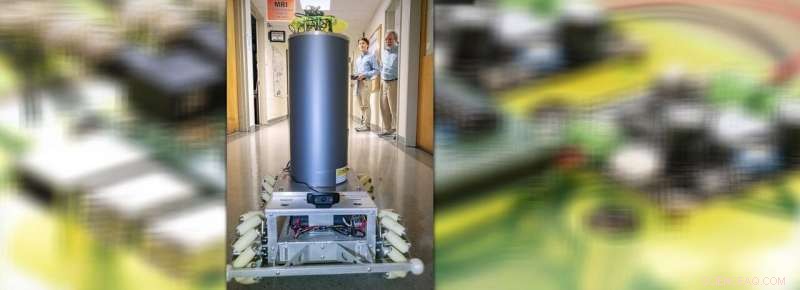
Detektorrobot i PPPL-gang før neutrontest. Bag robot fra venstre, Harry Fetsch, Science Undergraduate Laboratory Intern (SULI) og Rob Goldston, co-principal investigator af projektet. Kredit:Elle Starkman/PPPL Office of Communications
Forestil dig en sværm af autonome, tre fods rullende robotter bevæbnet med smarte detektorer til at understøtte nukleare sikkerhedsforanstaltninger og verificere våbenkontrolaftaler. Prototypen af sådanne robotter, udvikles af det amerikanske energiministeriums (DOE) Princeton Plasma Physics Laboratory (PPPL) og Princeton University, for nylig demonstreret evnen til at identificere kilden til nuklear stråling, og om den er blevet afskærmet for at undgå påvisning.
Påvisningen af neutroner fra et radioaktivt grundstof i PPPL-testen afgrænsede et to-årigt projekt finansieret af det amerikanske udenrigsministerium, der også bidrager til DOE's Consortium on Verification Technology. Den fjernstyrede prototype sætter scenen for videreudvikling af en mobil og fuldt autonom sværm. "Demonstrationen gav total bekræftelse af robottens evne til at detektere kilden til neutroner og leverede smukke data, " sagde PPPL fysiker Rob Goldston, en Princeton University professor i astrofysiske videnskaber, og en hovedefterforsker i projektet.
"Alt fremragende og lovende"
Co-principal investigator Alex Glaser, en Princeton-professor i ingeniørvidenskab og meddirektør for Princeton-programmet i videnskab og global sikkerhed, var lige så overstrømmende. "Alt, hvad vi så, ser fremragende og meget lovende ud, " sagde han. "PPPL gav stor støtte til dette projekt."
Den nu kalibrerede "inspektør-bot" består af en cylinder af polyethylenplast indeholdende tre neutrontællere sat 120 grader fra hinanden og monteret på en robot med specialiserede hjul, der gør den i stand til at bevæge sig i alle retninger. Detektorerne, designet af Goldston og Moritz Kütt, en tidligere postdoc Princeton-forsker, giver både høj følsomhed over for energien fra detekterede neutroner og den retning, hvorfra neutronerne kommer. Lav energi kan indikere afskærmning.
Når robotten er fuldt udviklet, kan den blive en del af en sværm af enheder, der udfører inspektionsopgaver i forskellige typer faciliteter. Foreslåede ansøgninger kan omfatte:
- Sikring af berigningsanlæg til gascentrifuger, faciliteter, der beriger uran til brændstof til atomkraftværker. Sådanne anlæg fodrer en gasformig form for uran gennem centrifuger, der opgraderer det til senere omdannelse til pulver og indføring i brændstofstave. Inspektørrobotter kunne bruges til at detektere uoplyst tilbagetrækning af højt beriget uran fra en brøkdel af planten omdirigeret til denne udeklarerede anvendelse;
- Botterne kunne yderligere opdage introduktion af lavberigede, snarere end naturligt, uran til et let modificeret berigelsesanlæg til fremstilling af uran af våbenkvalitet;
- Sværmen kan også bidrage til fremtidige nedrustningstraktater gennem opgaver som at inspicere lagerfaciliteter, der rummer atomsprænghoveder som forberedelse til demontering. Botterne kunne opdage, om sprænghoveder rent faktisk var der, og om det deklarerede antal våben var korrekt. De kunne også bruges til at fastslå, at erklærede ikke-nukleare militære anlæg ikke indeholder nukleare materialer.

Neutrondetektorrobot med udviklere og medlemmer af PPPL Health Physics-teamet. Fra venstre:Cathy Saville; Susan Thiel; Alex Glaser; Darren Thompson; Soha Aslam, Princeton University kandidatstuderende; Robert Hitchner; Rob Goldston; George Ascione; Andy Carpe; Patti Bruno. Sagde Goldston:"Jeg er utrolig taknemmelig for professionalismen og støtten fra Health Physics-teamet, som hjalp med at kalibrere robotten. En enorm ære går også til Andy Carpe, som guidede os over alle slags forhindringer." Kredit:Elle Starkman/PPPL Office of Communications
Machine learning software
Det næste trin i udviklingen inkluderer design af maskinlæringssoftware til at guide robotterne, og teknologi til at sætte robotterne i stand til at kommunikere med hinanden under inspektioner. Systemet med kunstig intelligens (AI), ledet af hovedefterforsker Naomi Leonard, Edwin S. Wilsey professor i mekanik og rumfartsteknik ved Princeton, anvender det, der kaldes den flerarmede bandit-tilgang - et statistisk system opkaldt efter at få de bedste resultater fra en række spilleautomater. Den vigtigste udfordring i at lede efter sorte aktiviteter er at foretage et klogt valg mellem at fortsætte med at udforske i stedet for at stoppe for at udnytte små signaler, der kunne være tegn på dårlig opførsel.
Idéen til projektet går tilbage til 2014, hvor Goldston og Mark Walker, en kandidatstuderende, hørt om et andet laboratorium, der installerede et loft med neutrondetektorer, der alle gik af, da en lastbil med urangas til berigelse kørte forbi. Det førte til tale om et robotdetektionssystem. "Jeg sagde, 'hvad med en robot?'" huskede Goldston, og Mark sagde:"hvad med en robot, det lyder skørt!"
Men Goldston blev opfordret til at undersøge denne mulighed i drøftelser med IAEA-inspektører og anlægsoperatører. Glaser indsendte et forslag til det amerikanske udenrigsministerium med en underkontrakt for PPPL om at konstruere og kalibrere en enkelt inspektør-bot, hvilket er, hvad holdet har opnået.
Højt gear
Projektet gik i høj kurs sidste sommer. Harry Fetsch, en fysikstuderende ved Harvey Mudd College i Science Undergraduate Laboratory Internship (SULI) ved PPPL, kørte tusindvis af computertimer for at simulere detektionssystemet. "Disse simuleringer informerede designet af de eksperimenter, vi udførte, " sagde Glaser.
Goldston planlægger nu at besøge DOE's Savannah River Site fabrikation af nukleart brændsel for at undersøge muligheden for at teste inspektørrobotten i et anlæg, hvor outputtet fra berigelsesanlæg går. "Vi vil se, om vi kan måle neutronerne, der kommer ud af autoklaverne, " sagde han om enheder, der bruges til at opvarme uran for at sende det ind i fabrikationsanlægget.
Med videreudvikling, projektet kunne demonstrere "at enkle og robuste autonome, mobil, retnings- og spektralfølsomme neutrondetektorer kunne udgøre et omkostningseffektivt middel til at give effektiv og effektiv verifikation, " sagde Goldston.
 Varme artikler
Varme artikler
-
 Coronavirus -udbrud:Sociale medieplatforme kæmper for at indeholde misinformationKredit:CC0 Public Domain Hoaxes om coronavirus spredes lige så hurtigt, hvis ikke hurtigere, end den faktiske virus på Facebook, YouTube og Twitter, og de sociale medieplatforme kæmper for at inde
Coronavirus -udbrud:Sociale medieplatforme kæmper for at indeholde misinformationKredit:CC0 Public Domain Hoaxes om coronavirus spredes lige så hurtigt, hvis ikke hurtigere, end den faktiske virus på Facebook, YouTube og Twitter, og de sociale medieplatforme kæmper for at inde -
 Amazon optimistisk på Prime Day, trods tidlige fejlI denne 3. august, 2017, fil foto, Myrtice Harris påfører tape på en pakke inden forsendelse på et Amazon-udfyldningscenter i Baltimore. Amazons Prime Day starter den 16. juli, 2018, og vil være seks
Amazon optimistisk på Prime Day, trods tidlige fejlI denne 3. august, 2017, fil foto, Myrtice Harris påfører tape på en pakke inden forsendelse på et Amazon-udfyldningscenter i Baltimore. Amazons Prime Day starter den 16. juli, 2018, og vil være seks -
 DAWG-systemet har til formål at forhindre angreb muliggjort af Meltdown og SpectreKredit:CC0 Public Domain I januar blev teknologiverdenen raslet af opdagelsen af Meltdown og Spectre, to store sikkerhedssårbarheder i processorerne, der kan findes i stort set alle computere på
DAWG-systemet har til formål at forhindre angreb muliggjort af Meltdown og SpectreKredit:CC0 Public Domain I januar blev teknologiverdenen raslet af opdagelsen af Meltdown og Spectre, to store sikkerhedssårbarheder i processorerne, der kan findes i stort set alle computere på -
 Facebook, Twitter-nedtagninger viser dilemma med hensyn til at bremse manipulationDe seneste undertrykkelser fra Facebook og Twitter mod falske konti understreger udfordringerne for sociale mediefirmaer at forblive åbne, mens de bremser manipulation og udenlandsk indblanding Fac
Facebook, Twitter-nedtagninger viser dilemma med hensyn til at bremse manipulationDe seneste undertrykkelser fra Facebook og Twitter mod falske konti understreger udfordringerne for sociale mediefirmaer at forblive åbne, mens de bremser manipulation og udenlandsk indblanding Fac
- Weyl går chiralt
- Barbequed muslinger på menuen for gamle Puerto Ricans
- Smeltning af skrottede enheder, da bæredygtige behov opvarmes
- Beyond Queens stamp-tramp-klap:Koncerter og datalogi mødes i ny forskning
- Kuldioxid er ikke den eneste drivhusgas, der betyder noget; gasser varierer meget i styrke og varigh…
- HydroAtlas kortlægger jordens flod- og afvandingssystemer for at forbedre forståelsen og beskyttel…