


Kunstig finger, der kan identificere overflademateriale med 90 % nøjagtighed
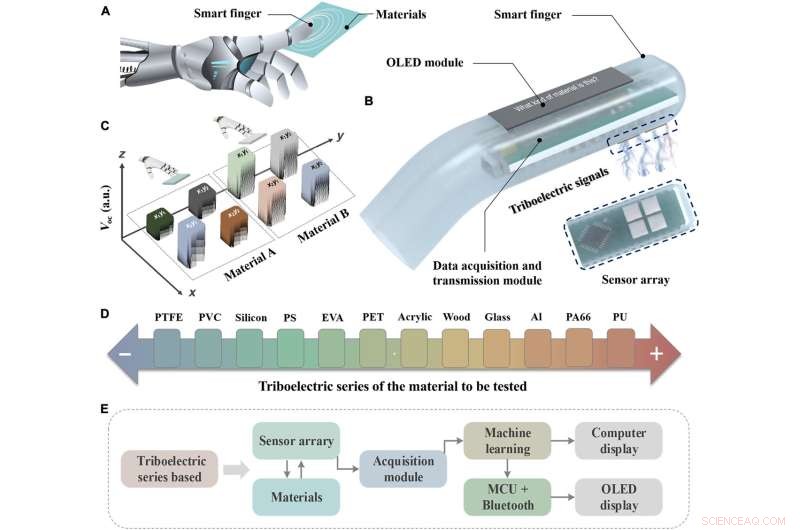
(A) Skematisk diagram af materialeidentifikationsprocessen for den triboelektriske taktile perception smart finger. (B) Struktur af den triboelektriske taktile perception smart finger, bestående af et triboelektrisk sensorarray, dataindsamlings- og transmissionsmodul og displaymodul. (C) Skematisk diagram af udgangssignalerne fra det triboelektriske sensorarray, når smartfingeren identificerer forskellige materialer. a.u., vilkårlige enheder. (D) Typiske materialer placeret i forskellige positioner i den triboelektriske serie:Elektronegativiteten øges fra højre til venstre; omvendt stiger elektropositiviteten fra venstre mod højre. (E) Flowchart over interaktionen mellem smartfingerens moduler ved identifikation af materialer. Kredit:Science Advances (2022). DOI:10.1126/sciadv.abq2521
Et team af forskere ved det kinesiske videnskabsakademi har udviklet en kunstig finger, der var i stand til at identificere visse overfladematerialer med 90% nøjagtighed. I deres papir offentliggjort i tidsskriftet Science Advances , beskriver gruppen, hvordan de brugte triboelektriske sensorer til at give deres testfinger en evne til at få en følesans.
Tidligere forskning har ført til udviklingen af robotfingre, der har evnen til at genkende bestemte egenskaber ved bestemte overflader, såsom tryk eller temperatur - holdet med denne nye indsats har taget sådanne bestræbelser videre ved at tilføje evnen til at identificere et materiale, der er bliver rørt.
Fingeren blev skabt ved at anvende små firkantede sensorer på spidsen af en fingerformet genstand. Hver af firkanterne var lavet af en anden slags plastikpolymer, hver valgt på grund af deres unikke elektriske egenskaber. Når sådanne sensorer flyttes tæt på et objekt, såsom en flad overflade, interagerer elektroner fra sensorerne med materialerne på unikke måder.
Sensorerne under polymeren var alle forbundet til deres egne processorer inde i fingeren, som derefter blev forbundet sammen for at muliggøre sammenligning af resultater og for maskinlæringsbaseret dataanalyse. Forskerne vedhæftede også en lille LCD-skærm til at vise resultater. Forskerne testede derefter deres finger ved at få den til at røre ved forskellige flade overflader såsom dem lavet af glas, træ, plastik og silicium. De fandt det i stand til at detektere det rigtige materiale i gennemsnit 96,8 % af tiden med en minimumsnøjagtighed på 90 % for alle overflader. Forskerne testede også fingeren for udholdenhed ved at få den til at røre en overflade tusindvis af gange og fandt ud af, at den holdt godt nok til industrielle anvendelser.
Forskerne foreslår, at hvis deres finger skulle bruges i industrielle omgivelser, kunne den forbindes direkte til en kontrolmekanisme. De foreslår også, at det kan bruges til at teste produkter for at sikre, at de opfylder produktionsstandarder. Og de bemærker også, at en sådan finger også kunne bruges på en menneskelig robot i fuld størrelse, hvilket øger dens muligheder. De påpeger, at teknologien bag deres finger sandsynligvis kan bruges i proteseanordninger for at hjælpe med at genoprette en vis grad af berøring for mennesker, der har mistet en sådan evne. + Udforsk yderligere
Lagerrobotter, der føles ved synet
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Pentagon vedtager nye etiske principper for brug af kunstig intelligens i krigI denne 20. dec. 2019, fil foto Forsvarsminister Mark Esper taler under et pressemøde i Pentagon i Washington. Pentagon vedtager nye etiske principper, mens det forbereder sig på at accelerere sin bru
Pentagon vedtager nye etiske principper for brug af kunstig intelligens i krigI denne 20. dec. 2019, fil foto Forsvarsminister Mark Esper taler under et pressemøde i Pentagon i Washington. Pentagon vedtager nye etiske principper, mens det forbereder sig på at accelerere sin bru -
 Forskere udvikler en ny måde at teste maskinlæringsalgoritmer, der styrer selvkørende bilerI dette eksempel, en opfattelsesalgoritme fejlklassificerer cyklisten som en fodgænger Kredit:Anand Balakrishnan Det er et stort spørgsmål for mange mennesker i trafiktætte byer som Los Angeles:Hv
Forskere udvikler en ny måde at teste maskinlæringsalgoritmer, der styrer selvkørende bilerI dette eksempel, en opfattelsesalgoritme fejlklassificerer cyklisten som en fodgænger Kredit:Anand Balakrishnan Det er et stort spørgsmål for mange mennesker i trafiktætte byer som Los Angeles:Hv -
 Californien afviser planer for højhastighedstog LA-SFEn model af højhastigheds Fuxing kugletoget lavet af den kinesiske jernbanegigant CRRC er udstillet på Innotrans, jernbanebranchens største messe, i Berlin den 19. september, 2018. Californiens gu
Californien afviser planer for højhastighedstog LA-SFEn model af højhastigheds Fuxing kugletoget lavet af den kinesiske jernbanegigant CRRC er udstillet på Innotrans, jernbanebranchens største messe, i Berlin den 19. september, 2018. Californiens gu -
 Forskere tester verdens første solbrændselsreaktor for nattenCONTISOL blev testet i Köln, Tyskland ved hjælp af simulerede sole, snarere end et egentligt solfelt, og lageret og varmeveksleren blev også simuleret, fordi selve reaktoren er den innovation, der tes
Forskere tester verdens første solbrændselsreaktor for nattenCONTISOL blev testet i Köln, Tyskland ved hjælp af simulerede sole, snarere end et egentligt solfelt, og lageret og varmeveksleren blev også simuleret, fordi selve reaktoren er den innovation, der tes
- Forskere går ind for statistisk tilgang til at søge efter jordlignende planeter
- Fedt fra 558 millioner år siden afslører det tidligste kendte dyr
- Et varmere klima kan indhente Phoenix
- Byplanlægningspolitik bidrager til politisk polarisering
- Højhastigheds FM-AFM og simulering afslører atomistiske opløsningsprocesser af calcit i vand
- Ekstrem nedbør forventes at blive mere alvorlige, hyppigt med opvarmning